1. New Features
1.1. New Features in CUDA Toolkit 6.0
NVIDIA® CUDA™ Toolkit version 6.0 introduces some exciting new features and capabilities.
1.1.1. CUDA Version 6.0 Highlights
- New featured samples that support a new CUDA 6.0 feature called UVM-Lite
- Added 0_Simple/UnifiedMemoryStreams - new CUDA sample that demonstrates the use of OpenMP and CUDA streams with Unified Memory on a single GPU.
- Added 1_Utilities/p2pBandwidthTestLatency - new CUDA sample that demonstrates how measure latency between pairs of GPUs with P2P enabled and P2P disabled.
- Added 6_Advanced/StreamPriorities - This sample demonstrates basic use of the new CUDA 6.0 feature stream priorities.
- Added 7_CUDALibraries/ConjugateGradientUM - This sample implements a conjugate gradient solver on GPU using cuBLAS and cuSPARSE library, using Unified Memory.
1.1.2. New CUDA 6.0 Code Samples
UnifiedMemoryStreams
This sample demonstrates the use of OpenMP and CUDA streams with Unified Memory on a single GPU.
p2pBandwidthLatencyTest
This sample measures the peer-to-peer bandwidth and latency between all pairs of GPUs in the system and outputs results in an easily readable matrix.
StreamPriorities
This sample demonstrates basic use of the new CUDA 6.0 feature stream priorities.
ConjugateGradientUM
This sample implements a Conjugate Gradient solver on GPU using cuBLAS and cuSPARSE library using the new CUDA 6.0 feature called Unified Memory.
1.2. New Features in CUDA Toolkit 5.5
NVIDIA® CUDA™ Toolkit version 5.5 introduces some exciting new features and capabilities.
1.2.1. CUDA Version 5.5 Highlights
- Linux makefiles have been updated to generate code for the AMRv7 architecture. Only the ARM hard-float floating point ABI is supported. Both native ARMv7 compilation and cross compilation from x86 is supported
- Performance improvements in CUDA toolkit for Kepler GPUs (SM 3.0 and SM 3.5)
- Makefiles projects have been updated to properly find search default paths for OpenGL, CUDA, MPI, and OpenMP libraries for all OS Platforms (Mac, Linux x86, Linux ARM).
- Linux and Mac project Makefiles now invoke NVCC for building and linking projects.
- Added 0_Simple/cppOverload - new CUDA sample that demonstrates how to use C++ overloading with CUDA.
- Added 6_Advanced/cdpBezierTesselation - new CUDA sample that demonstrates how to use NPP for JPEG compression on the GPU
- Added 7_CUDALibrariess/jpegNPP - new CUDA sample that demonstrates how to use NPP for JPEG compression on the GPU.
- CUDA Samples now have better integration with Nsight Eclipse IDE.
- 6_Advanced/ptxjit sample now includes a new API to demonstrate PTX linking at the driver level.
1.2.2. New CUDA 5.5 Code Samples
cdpBezierTesselation
This sample demonstrates an advanced method of implenting Bezier Line Tessellation using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
cppOverload
This sample demonstrates how to use C++ function overloading on the GPU.
jpegNPP
This sample demonstrates a simple image processing pipline. First, a JPEG file is huffman decoded and inverse DCT transformed and dequantized. Then the different plances are resized. Finally, the resized image is quantized, forward DCT transformed and huffman encoded.
ptxjit
This sample uses the Driver API to just-in-time compile (JIT) a Kernel from PTX code. Additionally, this sample demonstrates the seamless interoperability capability of the CUDA Runtime and CUDA Driver API calls. For CUDA 5.5, this sample shows how to use cuLink* functions to link PTX assembly using the CUDA driver at runtime.
1.3. New Features in CUDA Toolkit 5.0
NVIDIA® CUDA™ Toolkit version 5.0 introduces some exciting new features and capabilities. To illustrate the capabilities and advantages of the new features, the CUDA Toolkit includes many new and improved code samples. In addition, existing code samples have been upgraded to take advantage of the new features. This document serves as a guide to the new code samples as they relate to the new CUDA Toolkit Version 5.0 and Version 5.0 feature list.
1.3.1. CUDA Version 5.0 Highlights
- Native support for Kepler GPUs (SM 3.5), with CUDA Dynamic Parallelism as a new CUDA 5.0 feature.
- Overall improvements in driver and toolkit for Kepler GPUs (SM 3.0) performance.
- All projects and Makefiles have been updated accordingly.
- New directory structure for CUDA samples. Samples are classified accordingly to categories: 0_Simple, 1_Utilities, 2_Graphics, 3_Imaging, 4_Finance, 5_Simulations, 6_Advanced, and 7_CUDALibraries
1.3.2. CUDA Dynamic Parallelism Samples in CUDA 5.0 and CUDA 5.5
cdpSimplePrint
This sample demonstrates simple printf implemented using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
cdpSimpleQuickSort
This sample demonstrates a simple quicksort implemented using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
cdpAdvancedQuickSort
This sample demonstrates an advanced quicksort implemented using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
cdpBezierTesselation
This sample demonstrates an advanced method of implenting Bezier Line Tessellation using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
cdpLUDecomposition
This sample demonstrates LU Decomposition implemented using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
cdpQuadTree
This sample demonstrates Quad Trees implemented using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
simpleDevLibCUBLAS
This sample implements a simple cuBLAS function calls that call GPU device API library running cuBLAS functions. cuBLAS device code functions take advantage of CUDA Dynamic Parallelism and requires compute capability of 3.5 or higher.
1.3.3. New Revised CUDA Code Samples
simpleIPC
This CUDA Runtime API sample is a very basic sample that demonstrates Inter Process Communication with one process per GPU for computation. Requires Compute Capability 2.0 or higher and a Linux Operating System.
simpleSeparateCompilation
This sample demonstrates a CUDA 5.0 feature, the ability to create a GPU device static library and use it within another CUDA kernel. This example demonstrates how to pass in a GPU device function (from the GPU device static library) as a function pointer to be called. Requires Compute Capability 2.0 or higher.
bindlessTexture
This example demonstrates use of cudaSurfaceObject, cudaTextureObject, and MipMap support in CUDA. Requires Compute Capability 3.0 or higher.
stereoDisparity
A CUDA program that demonstrates how to compute a stereo disparity map using SIMD SAD (Sum of Absolute Difference) intrinsics. Requires Compute Capability 2.0 or higher.
1.4. New Features in CUDA Toolkit 4.2
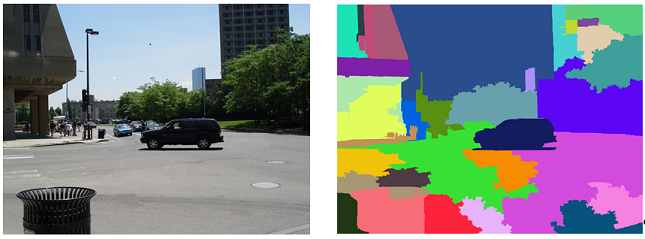
segmentationTreeThrust
This example demonstrates a method to build image segmentation trees
using Thrust. This algorithm is based on Boruvka's MST algorithm.
1.5. New Features in CUDA Toolkit 4.1
MersenneTwisterGP11213
This sample implements Mersenne Twister GP11213, a pseudorandom number generator using the cuRAND library.
HSOpticalFlow
When working with image sequences or video it's often useful to have information about objects movement. Optical flow describes apparent motion of objects in image sequence. This sample is a Horn-Schunck method for optical flow written using CUDA.
volumeFiltering
This sample demonstrates basic volume rendering and filtering using 3D textures.

simpleCubeMapTexture
This sample demonstrating how to use texcubemap fetch instruction in a CUDA C program.
simpleAssert
This sample demonstres how to use GPU assert in a CUDA C program.
NPP
For additional information about NPP, please refer to the document NPP_Library.pdf included with the CUDA toolkit.
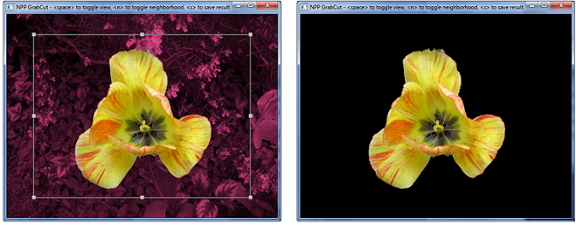
grabcutNPP
CUDA implementation of Rother et al. GrabCut approach using the 8 neighborhood NPP Graphcut primitive introduced in CUDA 4.1. (C. Rother, V. Kolmogorov, A. Blake. GrabCut: Interactive Foreground Extraction Using Iterated Graph Cuts. ACM Transactions on Graphics (SIGGRAPH'04), 2004).
2. Getting Started
This chapter documents minimum requirements and installation instructions followed by details on how to use the samples with your own CUDA projects.
2.1. Supported OS Platforms and Compilers
2.1.1. Supported Windows Platforms
OS Platform and Compiler Support with CUDA 6.0
- Continued support on Windows 8 and Windows Server 2012
OS Platform and Compiler Support with CUDA 5.5
- Added projects for Visual Studio 2012
- Continued support of Windows 8
OS Platform and Compiler Support with CUDA 5.0
- Added support for Windows 8
- Removed support for Visual Studio 2005
OS Platform and Compiler Support with CUDA 4.2 and 4.1
- No changes
OS Platform Support with CUDA 4.0
- New compilers supported
- Visual Studio 10 (2010)
- Continued supported compilers
- Visual Studio 9 (2008)
- Continued supported OS
- Windows XP, Windows Vista, Windows 7
- Windows Server 2008 and 2008 R2
OS Platform Support added to CUDA 3.0 Release
- Windows 7 32 and 64
- Windows Server 2008 and 2008 R2
OS Platform Support to CUDA 2.2
- Vista 32 and 64bit, WinXP 32 and 64-bit
- Visual Studio 9 (2008)
2.1.2. Supported Linux Platforms
OS Platform Support with CUDA 6.0 for x86 architectures
- New OS Platforms added
- Fedora 19 (64-bit only, gcc 4.8.1)
- Ubuntu 13.04 (64-bit only, gcc 4.7.3)
- CentOS 5.5+ (64-bit only, gcc 4.1.2)
- CentOS 6.4 (64-bit only, gcc 4.4.7)
- OpenSUSE 12.3 (64-bit only, gcc 4.7.2)
- SLES 11 SP3 (64-bit only, gcc 4.3.4)
- ICC Compiler 13.0 (64-bit only)
- Platforms continued support
- Ubuntu 12.04 (64-bit, gcc 4.6), Note: 32-bit is being depcreated
- RHEL 5.5+ (64-bit only, gcc 4.1.2)
- RHEL 6.x (64-bit only, gcc 4.4.7)
- SLES 11 SP2 (64-bit only, gcc 4.3.4)
- Platforms no longer supported
- Fedora 18 (64-bit only, gcc 4.7.2)
- Ubuntu 10.04 (gcc 4.4.5)
- Ubuntu 12.10 (gcc 4.7.2)
- OpenSUSE 12.2 (gcc 4.7.1)
- SLES 11 SP1 (gcc 4.3.4)
- ICC Compiler 12.1 (64-bit only)
- New OS Platforms added
- TODO
OS Platform Support with CUDA 5.5 for x86 architectures
- New OS Platforms added
- Ubuntu 12.04 (gcc 4.6)
- Ubuntu 12.10 (gcc 4.7)
- Fedora18 (64-bit only, gcc 4.7)
- OpenSUSE-12.2 (gcc 4.6.2, glibc 2.13) 64-bit
- ICC Compiler 12.1 64-bit
- Platforms continued support
- RHEL 5.5+ 64-bit (gcc 4.1.2, glibc 2.5)
- RHEL 6.X (gcc 4.4.5, glibc 2.12)
- Mac OSX 10.8.x
- Mac OSX 10.7.x
- SLES-11 SP1 (gcc 4.3.4, glibc 2.11.1) 64-bit
- SLES-11 SP2 (gcc 4.3.4, glibc 2.11.3) 64-bit
- ICC Compiler 12.1
- Windows Server 2008 R2
- Windows XP
- Windows Vista/Win7/Win8
- Platforms no longer supported
- Fedora16 (gcc 4.6.2, glibc 2.14.90)
- Ubuntu-11.04 (gcc 4.4.5, glibc 2.12.1)
- Ubuntu-11.10 (gcc 4.6.1, glibc 2.13)
- New OS Platforms added
- Ubuntu 12.04 (gcc 4.6)
OS Platform Support with CUDA 5.0
- New OS Platforms added
- Ubuntu 11.10 (gcc 4.6.2, glibc 2.13)
- Fedora16 (gcc 4.6.1, glibc 2.12.90)
- RHEL 5.5+ 64-bit (gcc 4.1.2, glibc 2.5)
- RHEL 6.X (gcc 4.4.5, glibc 2.12)
- OpenSUSE-11.2 (gcc 4.5.1, glibc 2.11.3)
- OpenSUSE-12.1 (gcc 4.6.2, glibc 2.13)
- ICC Compiler 12.1 64-bit
- Platforms no longer supported
- ICC Compiler 11.1 64-bit
- RHEL 5.5+ 32-bit (gcc 4.1.2, glibc 2.5)
- OpenSUSE-11.2 (gcc 4.4.1, glibc 2.10.1)
- SLES-11.1 (gcc 4.3.4, glibc 2.11.1)
- Fedora14 (gcc 4.5.1, glibc 2.12.90)
- Ubuntu-11.04 (gcc 4.5.2, glibc 2.13)
OS Platform Support with CUDA 4.2
- New OS Platforms added
- OpenSUSE-11.2 (gcc 4.5.1, glibc 2.11.3)
- Platforms no longer supported
- OpenSUSE-11.2 (gcc 4.4.1, glibc 2.10.1)
OS Platform Support with CUDA 4.1
- New OS Platforms added
- Ubuntu 11.04,
- Fedora 14,
- RHEL-5.5, 5.6, 5.7 (32-bit and 64-bit)
- RHEL-6.X (6.0, 6.1) (64-bit only),
- ICC Compiler 11.1 (32-bit and 64-bit) Linux
- Continued OS Platforms
- SLES 11.1,
- Ubuntu 10.04,
- OpenSUSE-11.2 (gcc 4.4.1, glibc 2.10.1)
- Platforms no longer supported
- Ubuntu 10.10,
- Fedora 13,
- RHEL-4.8
OS Platform Support with CUDA 4.0
- New OS Platforms added
- SLES11-SP1,
- RHEL-6.0 (64-bit only),
- Ubuntu 10.10
- Continued OS Platforms
- OpenSUSE-11.2
- Fedora 13,
- RHEL-4.8 (64-bit only),
- RHEL-5.5
- Platforms no longer supported
- RHEL-4.8 (32-bit only)
- Ubuntu 10.04,
- SLED11-SP1
OS Platform Support added to CUDA 3.2
- Additional Platform Support Linux 32 and 64:
- Fedora 13,
- Ubuntu 10.04,
- RHEL-5.5,
- SLED-11SP1,
- ICC (64-bit Linux only?)
- Platforms no longer supported
- Fedora 12,
- Ubuntu 9.10
- RHEL-5.4,
- SLED11
OS Platform Support added to CUDA 3.1
- Additional Platform Support Linux 32 and 64:
- Fedora 12,
- OpenSUSE-11.2,
- Ubuntu 9.10
- RHEL-5.4
- Platforms no longer supported
- Fedora 10,
- OpenSUSE-11.1,
- Ubuntu 9.04
OS Platform Support added to CUDA 3.0
- Linux Distributions 32 and 64:
- RHEL-4.x (4.8),
- RHEL-5.x (5.3),
- SLED-11
- Fedora10,
- Ubuntu 9.04,
- OpenSUSE 11.1 (gcc 3.4, gcc 4)
2.1.3. Supported Mac Platforms
OS Platform and Compiler Support with CUDA 6.0
- Continued support for Mac OS X 10.9.x
- Continued support for Mac OS X 10.8.x
- Removed support for Mac OS X 10.7.x
OS Platform and Compiler Support with CUDA 5.5
- CUDA Samples can now be built using CLANG instead of GCC
- This has been tested with versions Mac OS X 10.8.4
OS Platform and Compiler Support with CUDA 5.0
- Added support for Mac OS X 10.8.x
- Added support for Mac OS X 10.7.4
- Removed support for Mac OS X 10.6.8
OS Platform and Compiler Support with CUDA 4.2
- Official support for Mac OS X 10.7.3
OS Platform and Compiler Support with CUDA 4.1
- No changes
OS Platform Support with CUDA 4.0
- New OS Platforms added
- Mac OS X Lion 10.7.x
- Continued OS Platforms
- Mac OS X Snow Leopard 10.6.x
- Platforms no longer supported ?
OS Platform Support added to CUDA 3.2
- Mac OS X Snow Leopard 10.6.4
- Mac OS X Snow Leopard 10.6.5
OS Platform Support added to CUDA 3.1 Beta
- Mac OS X Snow Leopard 10.6.3
- 32/64-bit for CUDA Driver API
- 32/64-bit for CUDA Runtime API
OS Platform Support added to CUDA 3.0 Release
- Mac OS X Snow Leopard 10.6.x
- 32/64-bit for CUDA Driver API
- 32-bit for CUDA Runtime API
OS Platform Support added to CUDA 3.0 Beta 1
- Mac OS X Snow Leopard 10.6 (32-bit)
OS Platform Support added to CUDA 2.2
- Mac OS X Leopard 10.5.6+ (32-bit)
- (llvm-)gcc 5.0 Apple
2.1.4. Supported Android Platforms
OS Platform and Compiler Support with CUDA 6.0
- Android 4.2 (Jellybean) (Kernel 3.8, gcc 4.6.x)
- Android 4.3 (Jellybean) (gcc 4.7.x)
2.2. Installation Instructions
2.2.1. Windows Installation Instructions
CUDA 6.0 Toolkit Installer includes CUDA Toolkit 6.0 and Version R331 Driver (Windows XP, Vista, Win7, Win8, Windows Server 2008 R2, Windows Server 2012), and CUDA Samples.
- Uninstall any previous versions of the NVIDIA CUDA Toolkit and
NVIDIA CUDA Samples:
You can uninstall the NVIDIA CUDA Toolkit (e.g., version 5.5) through the Windows Control Panel menu:
You can uninstall the NVIDIA CUDA Samples (e.g., version 5.5) through the Windows Control Panel menu:
-
Install version Release 6.0 of the NVIDIA CUDA Toolkit by launching:
cuda_6.0.xx_[winxp_general|winvista_win7_win8_general|winvista_win7_win8_notebook]_[32|64].exe
The filename depends on the Windows operating system being used.
This installs the Toolkit, CUDA Samples, and Driver. Each of these components can be installed optionally in the installation GUI when launched for the first time. The full NVIDIA driver installation will happen after the Toolkit and CUDA Samples are installed.
-
Build the 32-bit and/or 64-bit release or
debug configurations of the project examples using
the provided:
- *_vs2008.sln
- solution files for Microsoft Visual Studio 2008
- *_vs2010.sln
- solution files for Microsoft Visual Studio 2010
- *_vs2012.sln
- solution files for Microsoft Visual Studio 2012
You can:
- Use the solution files located in each of the example
directories in:
CUDA Samples\v6.0\<category>
- Use the global solution files located under:
CUDA Samples\v6.0\ samples_vs2008.sln samples_vs2010.sln samples_vs2012.sln
Note:- The simpleD3D9 example and many others including CUDA DirectX samples require that Microsoft DirectX SDK (June 2010 or newer) is installed and that the VC++ directory paths are properly set up (located in ).
-
Prior to CUDA 5.0, CUDA Sample projects referenced a utility library with header and source files called cutil. This has been removed with the CUDA Samples in CUDA 5.0 going forward, and replaced with header files found in CUDA Samples\v6.0\common\inc: helper_cuda.h, helper_cuda_gl.h, helper_cuda_drvapi.h, helper_functions.h, helper_image.h, helper_math.h, helper_string.h, and helper_timer.h
These files provide utility functions for CUDA device initialization, CUDA error checking, string parsing, image file loading and saving, and timing functions. The CUDA Samples projects no longer have references and dependencies to cutil, and will now use these helper functions going forward.
-
Run the examples from the release or
debug directories located in:
CUDA Samples\v6.0\bin\win[32|64]\[release|debug]
Notes:- The release and debug configurations require a CUDA-capable GPU to run properly (see CUDA-Enabled GPUs in the CUDA Programming Guide for a complete list of CUDA-capable GPUs).
2.2.2. Linux Installation Instructions
- Before installing the combined installer, you must be in a console mode. Exit the GUI of your Linux environment by pressing Ctrl+Alt+Backspace.
- For some Linux distributions, you may need to stop GDM via:
> sudo /etc/init.d/gdm stop
or> /sbin/init 3
- Install the CUDA 6.0 Toolkit with one of the following commands:
- For 32-bit Linux distributions:
> sudo sh cuda_6.0.xx_linux_32_[distro].run
- For 64-bit Linux distributions:
> sudo sh cuda_6.0.xx_linux_64_[distro].run
Note: For optimus configurations, you may need to add --optimus to the CUDA Toolkit Installer. If you are instead installing a stand-alone driver on an Optimus system, you must pass --no-opengl-files to the installer and decline the xorg.conf update at the end of the installation.You are prompted for the path where you want to put the CUDA Toolkit (/usr/local/cuda-6.0 is the default) and CUDA Samples (~/NVIDIA_CUDA-6.0 is the default). CUDA Samples are treated like user development code (it is a collection of CUDA examples). During installation, the prompt is to accept the default or override it with a specified path to which the user has write permissions.
After installation, you can find the location of the files here:
- CUDA Toolkit: /usr/local/cuda-6.0 with a symbolic link /usr/local/cuda point to this folder.
- CUDA Samples: $(HOME)/NVIDIA_CUDA-6.0_Samples
Note: In addition, a pristine read-only version of the samples can also be found in /usr/local/cuda-6.0 - For 32-bit Linux distributions:
- Set up environment variables for CUDA Development.
You may want to add this to your ~/.bash_profile:
- Add the following to your system PATH:
export PATH=/usr/local/cuda-6.0/bin:$PATH
- Add the following to your LD_LIBRARY_PATH (if running on a 32-bit OS)
export LD_LIBRARY_PATH=/usr/local/cuda-6.0/lib:$LD_LIBRARY_PATH
- Add the following to your LD_LIBRARY_PATH (if running on a 64-bit OS)
export LD_LIBRARY_PATH=/usr/local/cuda-6.0/lib64:$LD_LIBRARY_PATH
- Add the following to your system PATH:
- Build the CUDA Samples projects:
cd <SAMPLES_INSTALL_PATH> make
Note: Adding the following in make builds for specific targets:- make x86_64=1
- for 64-bit targets
- make i386=1
- for 32-bit targets
- make
- for the release configuration
- make dbg=1
- for the debug configuration
Building the samples natively on ARM is done in exactly the same way, although it is not possible to target x86 targets.
When cross-building the samples on x86 to the ARMv7 architecture, make sure the following prerequisites are satisfied:
- The development machine must have Ubuntu 12.04 installed.
- The development machine must have the cuda-cross debian package installed.
- The development machine must have the gcc 4.6 arm cross compiler installed:
sudo apt-get install g++-4.6-arm-linux-gnueabihf
- The development machine must have access to the file system on the ARM target to in order to succesfully compile some of the sample applications. Either copy it to, or mount it on the development machine.
Note: Adding the following in make builds for ARMv7 targets:- make ARMv7=1 GCC=arm-linux-gnueabihf-g++-4.6 TARGET_FS=<rootfs>
- Where the <rootfs> directory contains the target filesystem
Note: Prior to CUDA 5.0, CUDA Sample projects referenced a utility library with header and source files called CUTIL. Also many of the Makefile projects have been rewritten to be self contained and no longer depend on common.mk. CUTIL has been removed with the CUDA Samples in CUDA 5.0 and later, and replaced with helper functions found in NVIDIA_CUDA-6.0/common/inc: helper_cuda.h, helper_cuda_gl.h, helper_cuda_drvapi.h, helper_functions.h, helper_image.h, helper_math.h, helper_string.h, helper_timer.hThese helper functions handle CUDA device initialization, CUDA error checking, string parsing, image file loading and saving, and timing functions. The CUDA Samples projects no longer have references and dependencies to CUTIL, and now use these helper functions going forward.
- Run the CUDA examples (32-bit or 64-bit Linux):
cd <SAMPLES_INSTALL_PATH>/bin/x86_64/linux/release matrixmul
(or any of the other executables in that directory)
2.2.3. Mac OS X Installation Instructions
The default installation folder <SAMPLES_INSTALL_PATH> is:
/Developer/NVIDIA/CUDA-6.0/samples
For Snow Leopard (10.6), Lion (10.7), and Mountain Lion (10.8):
- To boot up in 32-bit kernel mode, after Power-On (and hearing the boot up sound), hit keys 3 and 2 at the same time immediately after the startup sound. The OS will startup in a 32-bit kernel mode.
- To boot up with a 64-bit kernel, during Power-On, hit keys 6 and 4 at the same time.
Please install the packages in this order.
- Install the NVIDIA CUDA Toolkit Installer Package (Mac OSX Leopard)
-
Do you have a Quadro 4000 for Mac and/or recently updated to the Mac OSX 10.7.x? If so, please first install the release 256 or newer 319 driver for Mac. You can download the package from here:
http://www.nvidia.com/object/quadro-macosx-256.01.00f03-driver.html
- For NVIDIA GeForce GPU or Quadro GPUs, install this package:
cuda_6.0.xx_macos.pkg
-
- Install version 6.0 Release of the CUDA 6.0 Toolkit installer by
executing the file:
cuda_6.0.xx_macos.pkg
This package will work with Mac OS X running either 32-bit or 64-bit. CUDA applications built in 32/64-bit are supported in 10.7 Lion and 10.8 Mountain Lion
You are now able to pick which packages you wish to install
- CUDA Driver is installed to /Library/Frameworks/CUDA.framework
- CUDA Toolkit is installed to /Developer/NVIDIA/CUDA-6.0 (previous toolkit installations will automatically be moved to /Developer/NVIDIA/CUDA-#.#)
- CUDA Samples will be installed to /Developer/NVIDIA/CUDA-6.0/samples
After installation, you may want to add the following paths to your environment:
> export PATH=/Developer/NVIDIA/CUDA-6.0/bin:$PATH > export DYLD_LIBRARY_PATH=/Developer/NVIDIA/CUDA-6.0/lib:$DYLD_LIBRARY_PATH
To make these settings permanent, place them in ~/.bash_profile
- Build the CUDA sample project:
- Go to <SAMPLES_INSTALL_PATH> (cd <SAMPLES_INSTALL_PATH>)
- Build:
- make x86_64=1
- for 64-bit targets
- make i386=1
- for 32-bit targets
- make
- for the release configuration
- make dbg=1
- for the debug configuration
Note:Prior to CUDA 5.0, CUDA Sample projects referenced a utility library with header and source files called CUTIL. Also many of the Makefile projects have been rewritten to be self contained and no longer depend on common.mk. CUTIL has been removed with the CUDA Samples in CUDA 5.0 and later, and replaced with helper functions found in /Developer/NVIDIA/CUDA-6.0/common/inc: helper_cuda.h, helper_cuda_gl.h, helper_cuda_drvapi.h, helper_functions.h, helper_image.h, helper_math.h, helper_string.h, helper_timer.h
These helper functions handle CUDA device initialization, CUDA error checking, string parsing, image file loading and saving, and timing functions. The CUDA Samples projects no longer have references and dependencies to CUTIL, and now use these helper functions going forward.
- Run the CUDA examples:
cd <SAMPLES_INSTALL_PATH>/bin/x86_64/darwin/[release|debug] ./matrixmul
(or any of the other executables in that directory)
2.3. Using CUDA Samples to Create Your Own CUDA Projects
2.3.1. Creating CUDA Projects for Windows
Creating a new CUDA Program using the CUDA Samples infrastructure is easy. We have provided a template and template_runtime project that you can copy and modify to suit your needs. Just follow these steps:
(<category> refers to one of the following folders: 0_Simple, 1_Utilities, 2_Graphics, 3_Imaging, 4_Finance, 5_Simulations, 6_Advanced, 7_CUDALibraries.)
- Copy the content of:
C:\ProgramData\NVIDIA Corporation\CUDA Samples\v6.0\<category>\template
orC:\ProgramData\NVIDIA Corporation\CUDA Samples\v6.0\<category>\template_runtime
to a directory of your own:C:\ProgramData\NVIDIA Corporation\CUDA Samples\v6.0\<category>\myproject
- Edit the filenames of the project to suit your needs.
- Edit the *.sln, *.vcproj and source files. Just search and replace all occurrences of template or template_runtime with myproject.
- Build the 32-bit and/or 64-bit, release or debug configurations using:
- myproject_vs2008.sln
- myproject_vs2010.sln
- myproject_vs2012.sln
- Run myproject.exe from the release or debug directories located in:
C:\ProgramData\NVIDIA Corporation\CUDA Samples\v6.0\bin\win[32|64]\[release|debug]
- Now modify the code to perform the computation you require. See the CUDA Programming Guide for details of programming in CUDA.
2.3.2. Creating CUDA Projects for Linux
- Copy the template or template_runtime project:
cd <SAMPLES_INSTALL_PATH>/<category> cp -r template <myproject>
or (using template_runtime):cd <SAMPLES_INSTALL_PATH>/<category> cp -r template_runtime <myproject>
- Edit the filenames of the project to suit your needs:
mv template.cu myproject.cu mv template_kernel.cu myproject_kernel.cu mv template_gold.cpp myproject_gold.cpp
or (using template_runtime):mv main.cu myproject.cu
- Edit the Makefile and source files. Just search and replace all occurrences of template or template_runtime with myproject.
- Build the project as (release):
make
To build the project as (debug), use "make dbg=1":make dbg=1
- Run the program:
../../bin/x86_64/linux/release/myproject
- Now modify the code to perform the computation you require. See the CUDA Programming Guide for details of programming in CUDA.
2.3.3. Creating CUDA Projects for Mac OS X
Creating a new CUDA Program using the NVIDIA CUDA Samples infrastructure is easy. We have provided a template project that you can copy and modify to suit your needs. Just follow these steps:
(<category> is one of the following: 0_Simple, 1_Utilities, 2_Graphics, 3_Imaging, 4_Finance, 5_Simulations, 6_Advanced, 7_CUDALibraries.)
- Copy the template project:
cd <SAMPLES_INSTALL_PATH>/<category> cp -r template <myproject>
- Edit the filenames of the project to suit your needs:
mv template.cu myproject.cu mv template_kernel.cu myproject_kernel.cu mv template_gold.cpp myproject_gold.cpp
- Edit the Makefile and source files. Just search and replace all occurrences of template with myproject.
- Build the project as (release):
make
Note: To build the project as (debug), use "make dbg=1"make dbg=1
- Run the program:
../../bin/x86_64/darwin/release/myproject
(It should print PASSED.) - Now modify the code to perform the computation you require. See the CUDA Programming Guide for details of programming in CUDA.
3. Samples Reference
This document contains a complete listing of the code samples that are included with the NVIDIA CUDA Toolkit. It describes each code sample, lists the minimum GPU specification, and provides links to the source code and white papers if available.
- Simple Reference
- Basic CUDA samples for beginners that illustrate key concepts with using CUDA and CUDA runtime APIs.
- Utilities Reference
- Utility samples that demonstrate how to query device capabilities and measure GPU/CPU bandwidth.
- Graphics Reference
- Graphical samples that demonstrate interoperability between CUDA and OpenGL or DirectX.
- Imaging Reference
- Samples that demonstrate image processing, compression, and data analysis.
- Finance Reference
- Samples that demonstrate parallel algorithms for financial computing.
- Simulations Reference
- Samples that illustrate a number of simulation algorithms implemented with CUDA.
- Advanced Reference
- Samples that illustrate advanced algorithms implemented with CUDA.
- Cudalibraries Reference
- Samples that illustrate how to use CUDA platform libraries (NPP, cuBLAS, cuFFT, cuSPARSE, and cuRAND).
3.1. Simple Reference
cppOverload
This sample demonstrates how to use C++ function overloading on the GPU.
| Minimum Required GPU | SM 2.0 |
|---|---|
| CUDA API | cudaFuncSetCacheConfig, cudaFuncGetAttributes |
| Key Concepts | C++ Function Overloading, CUDA Streams and Events |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Quicksort (CUDA Dynamic Parallelism)
This sample demonstrates simple quicksort implemented using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
| Minimum Required GPU | KEPLER SM 3.5 |
|---|---|
| Key Concepts | CUDA Dynamic Parallelism |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Print (CUDA Dynamic Parallelism)
This sample demonstrates simple printf implemented using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
| Minimum Required GPU | KEPLER SM 3.5 |
|---|---|
| Key Concepts | CUDA Dynamic Parallelism |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Static GPU Device Library
This sample demonstrates a CUDA 5.0 feature, the ability to create a GPU device static library and use it within another CUDA kernel. This example demonstrates how to pass in a GPU device function (from the GPU device static library) as a function pointer to be called. This sample requires devices with compute capability 2.0 or higher.
| Minimum Required GPU | SM 2.0 |
|---|---|
| Key Concepts | Separate Compilation |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple CUDA Callbacks
This sample implements multi-threaded heterogeneous computing workloads with the new CPU callbacks for CUDA streams and events introduced with CUDA 5.0.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaStreamCreate, cudaMemcpyAsync, cudaStreamAddCallback, cudaStreamDestroy |
| Key Concepts | CUDA Streams, Callback Functions, Multithreading |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
simpleAssert
This CUDA Runtime API sample is a very basic sample that implements how to use the assert function in the device code. Requires Compute Capability 2.0 .
| Minimum Required GPU | SM 2.0 |
|---|---|
| CUDA API | cudaMalloc, cudaMallocHost, cudaFree, cudaFreeHost, cudaMemcpy |
| Key Concepts | Assert |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Cubemap Texture
Simple example that demonstrates how to use a new CUDA 4.1 feature to support cubemap Textures in CUDA C.
| Minimum Required GPU | SM 2.0 |
|---|---|
| CUDA API | cudaMalloc, cudaMalloc3DArray, cudaMemcpy3D, cudaCreateChannelDesc, cudaBindTextureToArray, cudaMalloc, cudaFree, cudaFreeArray, cudaMemcpy |
| Key Concepts | Texture, Volume Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Peer-to-Peer Transfers with Multi-GPU
This application demonstrates the new CUDA 4.0 APIs that support Peer-To-Peer (P2P) copies, Peer-To-Peer (P2P) addressing, and UVA (Unified Virtual Memory Addressing) between multiple Tesla GPUs.
| Minimum Required GPU | SM 2.0 |
|---|---|
| CUDA API | cudaDeviceCanAccessPeer, cudaDeviceEnablePeerAccess, cudaDeviceDisablePeerAccess, cudaEventCreateWithFlags, cudaEventElapsedTime, cudaMemcpy |
| Key Concepts | Performance Strategies, Asynchronous Data Transfers, Unified Virtual Address Space, Peer to Peer Data Transfers, Multi-GPU |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Using Inline PTX
A simple test application that demonstrates a new CUDA 4.0 ability to embed PTX in a CUDA kernel.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaMalloc, cudaMallocHost, cudaFree, cudaFreeHost, cudaMemcpy |
| Key Concepts | Performance Strategies, PTX Assembly, CUDA Driver API |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Layered Texture
Simple example that demonstrates how to use a new CUDA 4.0 feature to support layered Textures in CUDA C.
| Minimum Required GPU | SM 2.0 |
|---|---|
| CUDA API | cudaMalloc, cudaMalloc3DArray, cudaMemcpy3D, cudaCreateChannelDesc, cudaBindTextureToArray, cudaMalloc, cudaFree, cudaFreeArray, cudaMemcpy |
| Key Concepts | Texture, Volume Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
simplePrintf
This CUDA Runtime API sample is a very basic sample that implements how to use the printf function in the device code. Specifically, for devices with compute capability less than 2.0, the function cuPrintf is called; otherwise, printf can be used directly.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaPrintfDisplay, cudaPrintfEnd |
| Key Concepts | Debugging |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Surface Write
Simple example that demonstrates the use of 2D surface references (Write-to-Texture)
| Minimum Required GPU | SM 2.0 |
|---|---|
| CUDA API | cudaMalloc, cudaMallocArray, cudaBindSurfaceToArray, cudaBindTextureToArray, cudaCreateChannelDesc, cudaMalloc, cudaFree, cudaFreeArray, cudaMemcpy |
| Key Concepts | Texture, Surface Writes, Image Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Multi Copy and Compute
Supported in GPUs with Compute Capability 1.1, overlapping compute with one memcopy is possible from the host system. For Quadro and Tesla GPUs with Compute Capability 2.0, a second overlapped copy operation in either direction at full speed is possible (PCI-e is symmetric). This sample illustrates the usage of CUDA streams to achieve overlapping of kernel execution with data copies to and from the device.
| Minimum Required GPU | SM 1.1 |
|---|---|
| CUDA API | cudaEventCreate, cudaEventRecord, cudaEventQuery, cudaEventDestroy, cudaEventElapsedTime, cudaMemcpyAsync |
| Key Concepts | CUDA Streams and Events, Asynchronous Data Transfers, Overlap Compute and Copy, GPU Performance |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Vector Addition
This CUDA Runtime API sample is a very basic sample that implements element by element vector addition. It is the same as the sample illustrating Chapter 3 of the programming guide with some additions like error checking.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaEventCreate, cudaEventRecord, cudaEventQuery, cudaEventDestroy, cudaEventElapsedTime, cudaEventSynchronize, cudaMalloc, cudaFree, cudaMemcpy |
| Key Concepts | CUDA Runtime API, Vector Addition |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Vector Addition Driver API
This Vector Addition sample is a basic sample that is implemented element by element. It is the same as the sample illustrating Chapter 3 of the programming guide with some additions like error checking. This sample also uses the new CUDA 4.0 kernel launch Driver API.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cuModuleLoad, cuModuleLoadDataEx, cuModuleGetFunction, cuMemAlloc, cuMemFree, cuMemcpyHtoD, cuMemcpyDtoH, cuLaunchKernel |
| Key Concepts | CUDA Driver API, Vector Addition |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Template using CUDA Runtime
A trivial template project that can be used as a starting point to create new CUDA Runtime API projects.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaMalloc, cudaMallocHost, cudaFree, cudaFreeHost, cudaDeviceSynchronize, cudaMemcpy |
| Key Concepts | CUDA Data Transfers, Device Memory Allocation |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Template
A trivial template project that can be used as a starting point to create new CUDA projects.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaMalloc, cudaFree, cudaDeviceSynchronize, cudaMemcpy |
| Key Concepts | Device Memory Allocation |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
C++ Integration
This example demonstrates how to integrate CUDA into an existing C++ application, i.e. the CUDA entry point on host side is only a function which is called from C++ code and only the file containing this function is compiled with nvcc. It also demonstrates that vector types can be used from cpp.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaMalloc, cudaFree, cudaMemcpy |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
asyncAPI
This sample uses CUDA streams and events to overlap execution on CPU and GPU.
| Minimum Required GPU | SM 1.1 |
|---|---|
| CUDA API | cudaEventCreate, cudaEventRecord, cudaEventQuery, cudaEventDestroy, cudaEventElapsedTime, cudaMemcpyAsync |
| Key Concepts | Asynchronous Data Transfers, CUDA Streams and Events |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Clock
This example shows how to use the clock function to measure the performance of kernel accurately.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaMalloc, cudaFree, cudaMemcpy |
| Key Concepts | Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Atomic Intrinsics
A simple demonstration of global memory atomic instructions. Requires Compute Capability 1.1 or higher.
| Minimum Required GPU | SM 1.1 |
|---|---|
| CUDA API | cudaMallco, cudaFree, cudaMemcpy, cudaFreeHost |
| Key Concepts | Atomic Intrinsics |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Pitch Linear Texture
Use of Pitch Linear Textures
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaMallocPitch, cudaMallocArray, cudaMemcpy2D, cudaMemcpyToArray, cudaBindTexture2D, cudaBindTextureToArray, cudaCreateChannelDesc, cudaMalloc, cudaFree, cudaFreeArray, cudaUnbindTexture, cudaMemset2D, cudaMemcpy2D |
| Key Concepts | Texture, Image Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
simpleStreams
This sample uses CUDA streams to overlap kernel executions with memory copies between the host and a GPU device. This sample uses a new CUDA 4.0 feature that supports pinning of generic host memory. Requires Compute Capability 1.1 or higher.
| Minimum Required GPU | SM 1.1 |
|---|---|
| CUDA API | cudaEventCreate, cudaEventRecord, cudaEventQuery, cudaEventDestroy, cudaEventElapsedTime, cudaMemcpyAsync |
| Key Concepts | Asynchronous Data Transfers, CUDA Streams and Events |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Templates
This sample is a templatized version of the template project. It also shows how to correctly templatize dynamically allocated shared memory arrays.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | C++ Templates |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Texture
Simple example that demonstrates use of Textures in CUDA.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaMalloc, cudaMallocArray, cudaMemcpyToArray, cudaCreateChannelDesc, cudaBindTextureToArray, cudaMalloc, cudaFree, cudaFreeArray, cudaMemcpy |
| Key Concepts | CUDA Runtime API, Texture, Image Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Texture (Driver Version)
Simple example that demonstrates use of Textures in CUDA. This sample uses the new CUDA 4.0 kernel launch Driver API.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cuModuleLoad, cuModuleLoadDataEx, cuModuleGetFunction, cuLaunchKernel, cuCtxSynchronize, cuMemcpyDtoH, cuMemAlloc, cuMemFree, cuArrayCreate, cuArrayDestroy, cuCtxDetach, cuMemcpy2D, cuModuleGetTexRef, cuTexRefSetArray, cuTexRefSetAddressMode, cuTexRefSetFilterMode, cuTexRefSetFlags, cuTexRefSetFormat, cuParamSetTexRef |
| Key Concepts | CUDA Driver API, Texture, Image Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Vote Intrinsics
Simple program which demonstrates how to use the Vote (any, all) intrinsic instruction in a CUDA kernel. Requires Compute Capability 1.2 or higher.
| Minimum Required GPU | SM 1.2 |
|---|---|
| CUDA API | cudaMallco, cudaFree, cudaMemcpy, cudaFreeHost |
| Key Concepts | Vote Intrinsics |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
simpleZeroCopy
This sample illustrates how to use Zero MemCopy, kernels can read and write directly to pinned system memory. This sample requires GPUs that support this feature (MCP79 and GT200).
| Minimum Required GPU | SM 1.2 |
|---|---|
| CUDA API | cudaEventCreate, cudaEventRecord, cudaEventQuery, cudaEventDestroy, cudaEventElapsedTime, cudaHostAlloc, cudaHostGetDevicePointer, cudaHostRegister, cudaHostUnregister, cudaFreeHost |
| Key Concepts | Performance Strategies, Pinned System Paged Memory, Vector Addition |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | CUDA2.2PinnedMemoryAPIs.pdf |
Simple Multi-GPU
This application demonstrates how to use the new CUDA 4.0 API for CUDA context management and multi-threaded access to run CUDA kernels on multiple-GPUs.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaEventCreate, cudaEventRecord, cudaEventQuery, cudaEventDestroy, cudaEventElapsedTime, cudaMemcpyAsync |
| Key Concepts | Asynchronous Data Transfers, CUDA Streams and Events, Multithreading, Multi-GPU |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Matrix Multiplication (CUBLAS)
This sample implements matrix multiplication from Chapter 3 of the programming guide. To illustrate GPU performance for matrix multiply, this sample also shows how to use the new CUDA 4.0 interface for CUBLAS to demonstrate high-performance performance for matrix multiplication.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaEventCreate, cudaEventRecord, cudaEventQuery, cudaEventDestroy, cudaEventElapsedTime, cudaMalloc, cudaFree, cudaMemcpy, cublasCreate, cublasSgemm |
| Key Concepts | CUDA Runtime API, Performance Strategies, Linear Algebra, CUBLAS |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Matrix Multiplication (CUDA Runtime API Version)
This sample implements matrix multiplication and is exactly the same as Chapter 6 of the programming guide. It has been written for clarity of exposition to illustrate various CUDA programming principles, not with the goal of providing the most performant generic kernel for matrix multiplication. To illustrate GPU performance for matrix multiply, this sample also shows how to use the new CUDA 4.0 interface for CUBLAS to demonstrate high-performance performance for matrix multiplication.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaEventCreate, cudaEventRecord, cudaEventQuery, cudaEventDestroy, cudaEventElapsedTime, cudaEventSynchronize, cudaMalloc, cudaFree, cudaMemcpy |
| Key Concepts | CUDA Runtime API, Linear Algebra |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Matrix Multiplication (CUDA Driver API Version)
This sample implements matrix multiplication and uses the new CUDA 4.0 kernel launch Driver API. It has been written for clarity of exposition to illustrate various CUDA programming principles, not with the goal of providing the most performant generic kernel for matrix multiplication. CUBLAS provides high-performance matrix multiplication.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cuModuleLoad, cuModuleLoadDataEx, cuModuleGetFunction, cuMemAlloc, cuMemFree, cuMemcpyHtoD, cuMemcpyDtoH, cuLaunchKernel |
| Key Concepts | CUDA Driver API, Matrix Multiply |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Unified Memory Streams
This sample demonstrates the use of OpenMP and streams with Unified Memory on a single GPU.
| Minimum Required GPU | SM 3.0 |
|---|---|
| CUDA API | cudaMallocManaged, cudaStreamAttachManagedMem |
| Key Concepts | CUDA Systems Integration, OpenMP, CUBLAS, Multithreading, Unified Memory, CUDA Streams and Events |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
simpleMPI
Simple example demonstrating how to use MPI in combination with CUDA. This executable is not pre-built with the SDK installer.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaMallco, cudaFree, cudaMemcpy |
| Key Concepts | CUDA Systems Integration, MPI, Multithreading |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
cudaOpenMP
This sample demonstrates how to use OpenMP API to write an application for multiple GPUs. This executable is not pre-built with the SDK installer.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaMalloc, cudaFree, cudaMemcpy |
| Key Concepts | CUDA Systems Integration, OpenMP, Multithreading |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
3.2. Utilities Reference
Peer-to-Peer Bandwidth Latency Test with Multi-GPUs
This application demonstrates the CUDA Peer-To-Peer (P2P) data transfers between pairs of GPUs and computes latency and bandwidth. Tests on GPU pairs using P2P and without P2P are tested.
| Minimum Required GPU | SM 2.0 |
|---|---|
| CUDA API | cudaDeviceCanAccessPeer, cudaDeviceEnablePeerAccess, cudaDeviceDisablePeerAccess, cudaEventCreateWithFlags, cudaEventElapsedTime, cudaMemcpy |
| Key Concepts | Performance Strategies, Asynchronous Data Transfers, Unified Virtual Address Space, Peer to Peer Data Transfers, Multi-GPU |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Device Query
This sample enumerates the properties of the CUDA devices present in the system.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaSetDevice, cudaGetDeviceCount, cudaGetDeviceProperties, cudaDriverGetVersion, cudaRuntimeGetVersion |
| Key Concepts | CUDA Runtime API, Device Query |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Device Query Driver API
This sample enumerates the properties of the CUDA devices present using CUDA Driver API calls
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cuInit, cuDeviceGetCount, cuDeviceComputeCapability, cuDriverGetVersion, cuDeviceTotalMem, cuDeviceGetAttribute |
| Key Concepts | CUDA Driver API, Device Query |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Bandwidth Test
This is a simple test program to measure the memcopy bandwidth of the GPU and memcpy bandwidth across PCI-e. This test application is capable of measuring device to device copy bandwidth, host to device copy bandwidth for pageable and page-locked memory, and device to host copy bandwidth for pageable and page-locked memory.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaSetDevice, cudaHostAlloc, cudaFree, cudaMallocHost, cudaFreeHost, cudaMemcpy, cudaMemcpyAsync, cudaEventCreate, cudaEventRecord, cudaEventDestroy, cudaDeviceSynchronize, cudaEventElapsedTime |
| Key Concepts | CUDA Streams and Events, Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
3.3. Graphics Reference
Bindless Texture
This example demonstrates use of cudaSurfaceObject, cudaTextureObject, and MipMap support in CUDA. A GPU with Compute Capability SM 3.0 is required to run the sample.
| Minimum Required GPU | KEPLER SM 3.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Texture |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Volumetric Filtering with 3D Textures and Surface Writes
This sample demonstrates 3D Volumetric Filtering using 3D Textures and 3D Surface Writes.
| Minimum Required GPU | SM 2.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Image Processing, 3D Textures, Surface Writes |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
SLI D3D10 Texture
Simple program which demonstrates SLI with Direct3D10 Texture interoperability with CUDA. The program creates a D3D10 Texture which is written to from a CUDA kernel. Direct3D then renders the results on the screen. A Direct3D Capable device is required.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaD3D10GetDevice, cudaD3D10SetDirect3DDevice, cudaGraphicsD3D10RegisterResource, cudaGraphicsResourceSetMapFlags, cudaGraphicsSubResourceGetMappedArray, cudaMemcpy2DToArray, cudaGraphicsUnregisterResource |
| Key Concepts | Performance Strategies, Graphics Interop, Image Processing, 2D Textures |
| Supported OSes | Windows (zip) |
Simple D3D11 Texture
Simple program which demonstrates Direct3D11 Texture interoperability with CUDA. The program creates a number of D3D11 Textures (2D, 3D, and CubeMap) which are written to from CUDA kernels. Direct3D then renders the results on the screen. A Direct3D Capable device is required.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaD3D11GetDevice, cudaD3D11SetDirect3DDevice, cudaGraphicsD3D11RegisterResource, cudaGraphicsResourceSetMapFlags, cudaGraphicsSubResourceGetMappedArray, cudaMemcpy2DToArray, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Image Processing |
| Supported OSes | Windows (zip) |
Simple Direct3D9 (Vertex Arrays)
Simple program which demonstrates interoperability between CUDA and Direct3D9. The program generates a vertex array with CUDA and uses Direct3D9 to render the geometry. A Direct3D capable device is required.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaD3D9GetDevice, cudaD3D9SetDirect3DDevice, cudaGraphicsD3D9RegisterResource, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop |
| Supported OSes | Windows (zip) |
Simple D3D9 Texture
Simple program which demonstrates Direct3D9 Texture interoperability with CUDA. The program creates a number of D3D9 Textures (2D, 3D, and CubeMap) which are written to from CUDA kernels. Direct3D then renders the results on the screen. A Direct3D capable device is required.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaD3D9GetDevice, cudaD3D9SetDirect3DDevice, cudaGraphicsD3D9RegisterResource, cudaGraphicsResourceSetMapFlags, cudaGraphicsSubResourceGetMappedArray, cudaMemcpy2DToArray, cudaMemcpy3D, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Texture |
| Supported OSes | Windows (zip) |
Simple Direct3D10 (Vertex Array)
Simple program which demonstrates interoperability between CUDA and Direct3D10. The program generates a vertex array with CUDA and uses Direct3D10 to render the geometry. A Direct3D Capable device is required.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaD3D10GetDevice, cudaD3D10SetDirect3DDevice, cudaGraphicsD3D10RegisterResource, cudaGraphicsResourceSetMapFlags, cudaGraphicsSubResourceGetMappedArray, cudaMemcpy2DToArray, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, 3D Graphics |
| Supported OSes | Windows (zip) |
Simple Direct3D10 Render Target
Simple program which demonstrates interop of rendertargets between Direct3D10 and CUDA. The program uses RenderTarget positions with CUDA and generates a histogram with visualization. A Direct3D10 Capable device is required.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaD3D10GetDevice, cudaD3D10SetDirect3DDevice, cudaGraphicsD3D10RegisterResource, cudaGraphicsResourceSetMapFlags, cudaGraphicsSubResourceGetMappedArray, cudaMemcpy2DToArray, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Texture |
| Supported OSes | Windows (zip) |
Simple D3D10 Texture
Simple program which demonstrates how to interoperate CUDA with Direct3D10 Texture. The program creates a number of D3D10 Textures (2D, 3D, and CubeMap) which are generated from CUDA kernels. Direct3D then renders the results on the screen. A Direct3D10 Capable device is required.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaD3D10GetDevice, cudaD3D10SetDirect3DDevice, cudaGraphicsD3D10RegisterResource, cudaGraphicsResourceSetMapFlags, cudaGraphicsSubResourceGetMappedArray, cudaMemcpy2DToArray, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Texture |
| Supported OSes | Windows (zip) |
Simple OpenGL
Simple program which demonstrates interoperability between CUDA and OpenGL. The program modifies vertex positions with CUDA and uses OpenGL to render the geometry.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Vertex Buffers, 3D Graphics |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple Texture 3D
Simple example that demonstrates use of 3D Textures in CUDA.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Image Processing, 3D Textures, Surface Writes |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Mandelbrot
This sample uses CUDA to compute and display the Mandelbrot or Julia sets interactively. It also illustrates the use of "double single" arithmetic to improve precision when zooming a long way into the pattern. This sample use double precision hardware if a GT200 class GPU is present. Thanks to Mark Granger of NewTek who submitted this code sample.!
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Data Parallel Algorithms |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Marching Cubes Isosurfaces
This sample extracts a geometric isosurface from a volume dataset using the marching cubes algorithm. It uses the scan (prefix sum) function from the Thrust library to perform stream compaction.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | OpenGL Graphics Interop, Vertex Buffers, 3D Graphics, Physically Based Simulation |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Volume Rendering with 3D Textures
This sample demonstrates basic volume rendering using 3D Textures.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Image Processing, 3D Textures |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
3.4. Imaging Reference
CUDA and OpenGL Interop of Images
This sample shows how to copy CUDA image back to OpenGL using the most efficient methods.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Image Processing, Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Stereo Disparity Computation (SAD SIMD Intrinsics)
A CUDA program that demonstrates how to compute a stereo disparity map using SIMD SAD (Sum of Absolute Difference) intrinsics. Requires Compute Capability 2.0 or higher.
| Minimum Required GPU | SM 2.0 |
|---|---|
| Key Concepts | Image Processing, Video Intrinsics |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Optical Flow
Variational optical flow estimation example. Uses textures for image operations. Shows how simple PDE solver can be accelerated with CUDA.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Image Processing, Data Parallel Algorithms |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | OpticalFlow.pdf |
CUDA Video Encode (C Library) API
This sample demonstrates how to effectively use the CUDA Video Encoder API encode H.264 video. Video input in YUV formats are taken as input (either CPU system or GPU memory) and video output frames are encoded to an H.264 file
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | CreateHWEncInterfaceInstance, CreateHWEncoder, GetHWEncodeCaps, IsSupportedCodec, IsSupportedCodecProfile, IsSupportedParam, EncodeFrameUT, RegisterCB, GetSPSPPS, SetCodecType, GetCodecType, SetParamValue, GetParamValue, SetDefaultParam, DestroyEncoder, SetParamValue, GetParamValue, cuvidCtxLock, cuvidCtxUnlock |
| Key Concepts | Graphics Interop, Video Compression |
| Supported OSes | Windows (zip) |
| Whitepaper | nvcuvenc.pdf |
Bilateral Filter
Bilateral filter is an edge-preserving non-linear smoothing filter that is implemented with CUDA with OpenGL rendering. It can be used in image recovery and denoising. Each pixel is weight by considering both the spatial distance and color distance between its neighbors. Reference:"C. Tomasi, R. Manduchi, Bilateral Filtering for Gray and Color Images, proceeding of the ICCV, 1998, http://users.soe.ucsc.edu/~manduchi/Papers/ICCV98.pdf"
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Image Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
DCT8x8
This sample demonstrates how Discrete Cosine Transform (DCT) for blocks of 8 by 8 pixels can be performed using CUDA: a naive implementation by definition and a more traditional approach used in many libraries. As opposed to implementing DCT in a fragment shader, CUDA allows for an easier and more efficient implementation.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Image Processing, Video Compression |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | dct8x8.pdf |
1D Discrete Haar Wavelet Decomposition
Discrete Haar wavelet decomposition for 1D signals with a length which is a power of 2.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Image Processing, Video Compression |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
CUDA Histogram
This sample demonstrates efficient implementation of 64-bin and 256-bin histogram.
| Minimum Required GPU | SM 1.1 |
|---|---|
| Key Concepts | Image Processing, Data Parallel Algorithms |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | histogram.pdf |
Box Filter
Fast image box filter using CUDA with OpenGL rendering.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Image Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Post-Process in OpenGL
This sample shows how to post-process an image rendered in OpenGL using CUDA.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Image Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
DirectX Texture Compressor (DXTC)
High Quality DXT Compression using CUDA. This example shows how to implement an existing computationally-intensive CPU compression algorithm in parallel on the GPU, and obtain an order of magnitude performance improvement.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Image Processing, Image Compression |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | cuda_dxtc.pdf |
Image denoising
This sample demonstrates two adaptive image denoising techniques: KNN and NLM, based on computation of both geometric and color distance between texels. While both techniques are implemented in the DirectX SDK using shaders, massively speeded up variation of the latter technique, taking advantage of shared memory, is implemented in addition to DirectX counterparts.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Image Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | imageDenoising.pdf |
Sobel Filter
This sample implements the Sobel edge detection filter for 8-bit monochrome images.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Image Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Recursive Gaussian Filter
This sample implements a Gaussian blur using Deriche's recursive method. The advantage of this method is that the execution time is independent of the filter width.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Image Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
CUDA Video Decoder D3D9 API
This sample demonstrates how to efficiently use the CUDA Video Decoder API to decode MPEG-2, VC-1, or H.264 sources. YUV to RGB conversion of video is accomplished with CUDA kernel. The output result is rendered to a D3D9 surface. The decoded video is not displayed on the screen, but with -displayvideo at the command line parameter, the video output can be seen. Requires a Direct3D capable device and Compute Capability 1.1 or higher.
CUDA Video Decoder GL API
This sample demonstrates how to efficiently use the CUDA Video Decoder API to decode video sources based on MPEG-2, VC-1, and H.264. YUV to RGB conversion of video is accomplished with CUDA kernel. The output result is rendered to a OpenGL surface. The decoded video is black, but can be enabled with -displayvideo added to the command line. Requires Compute Capability 1.1 or higher.
Bicubic B-spline Interoplation
This sample demonstrates how to efficiently implement a Bicubic B-spline interpolation filter with CUDA texture.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Image Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
FFT-Based 2D Convolution
This sample demonstrates how 2D convolutions with very large kernel sizes can be efficiently implemented using FFT transformations.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cufftPlan2d, cufftExecR2C, cufftExecC2R, cufftDestroy |
| Key Concepts | Image Processing, CUFFT Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
CUDA Separable Convolution
This sample implements a separable convolution filter of a 2D signal with a gaussian kernel.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Image Processing, Data Parallel Algorithms |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | convolutionSeparable.pdf |
Texture-based Separable Convolution
Texture-based implementation of a separable 2D convolution with a gaussian kernel. Used for performance comparison against convolutionSeparable.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Image Processing, Texture, Data Parallel Algorithms |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
3.5. Finance Reference
Binomial Option Pricing
This sample evaluates fair call price for a given set of European options under binomial model. This sample will also take advantage of double precision if a GTX 200 class GPU is present.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Computational Finance |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | binomialOptions.pdf |
Black-Scholes Option Pricing
This sample evaluates fair call and put prices for a given set of European options by Black-Scholes formula.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Computational Finance |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | BlackScholes.pdf |
Niederreiter Quasirandom Sequence Generator
This sample implements Niederreiter Quasirandom Sequence Generator and Inverse Cumulative Normal Distribution functions for the generation of Standard Normal Distributions.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Computational Finance |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Monte Carlo Option Pricing with Multi-GPU support
This sample evaluates fair call price for a given set of European options using the Monte Carlo approach, taking advantage of all CUDA-capable GPUs installed in the system. This sample use double precision hardware if a GTX 200 class GPU is present. The sample also takes advantage of CUDA 4.0 capability to supporting using a single CPU thread to control multiple GPUs
| Minimum Required GPU | SM 1.0 |
|---|---|
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | MonteCarlo.pdf |
Sobol Quasirandom Number Generator
This sample implements Sobol Quasirandom Sequence Generator.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Computational Finance |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Excel 2010 CUDA Integration Example
This sample demonstrates how to integrate Excel 2010 with CUDA using array formulas. This plug-in depends on the Microsoft Excel 2010 Developer Kit, which can be downloaded from the Microsoft Developer website. This sample is not pre-built with the CUDA SDK.
3.6. Simulations Reference
VFlockingD3D10
This sample demonstrates a CUDA mathematical simulation of group of birds behavior when in flight.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaD3D10SetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Data Parallel Algorithms, Physically-Based Simulation, Performance Strategies |
| Supported OSes | Windows (zip) |
Fluids (Direct3D Version)
An example of fluid simulation using CUDA and CUFFT, with Direct3D 9 rendering. A Direct3D Capable device is required.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaD3D9SetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, CUFFT Library, Physically-Based Simulation |
| Supported OSes | Windows (zip) |
Fluids (OpenGL Version)
An example of fluid simulation using CUDA and CUFFT, with OpenGL rendering.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, CUFFT Library, Physically-Based Simulation |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | fluidsGL.pdf |
CUDA FFT Ocean Simulation
This sample simulates an Ocean height field using CUFFT Library and renders the result using OpenGL.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource, cufftPlan2d, cufftExecR2C, cufftExecC2R, cufftDestroy |
| Key Concepts | Graphics Interop, Image Processing, CUFFT Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Particles
This sample uses CUDA to simulate and visualize a large set of particles and their physical interaction. Adding "-particles=<N>" to the command line will allow users to set # of particles for simulation. This example implements a uniform grid data structure using either atomic operations or a fast radix sort from the Thrust library
| Minimum Required GPU | SM 1.1 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Data Parallel Algorithms, Physically-Based Simulation, Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | particles.pdf |
CUDA N-Body Simulation
This sample demonstrates efficient all-pairs simulation of a gravitational n-body simulation in CUDA. This sample accompanies the GPU Gems 3 chapter "Fast N-Body Simulation with CUDA". With CUDA 5.5, performance on Tesla K20c has increased to over 1.8TFLOP/s single precision. Double Performance has also improved on all Kepler and Fermi GPU architectures as well. Starting in CUDA 4.0, the nBody sample has been updated to take advantage of new features to easily scale the n-body simulation across multiple GPUs in a single PC. Adding "-numbodies=<bodies>" to the command line will allow users to set # of bodies for simulation. Adding “-numdevices=<N>” to the command line option will cause the sample to use N devices (if available) for simulation. In this mode, the position and velocity data for all bodies are read from system memory using “zero copy” rather than from device memory. For a small number of devices (4 or fewer) and a large enough number of bodies, bandwidth is not a bottleneck so we can achieve strong scaling across these devices.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Data Parallel Algorithms, Physically-Based Simulation |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | nbody_gems3_ch31.pdf |
Smoke Particles
Smoke simulation with volumetric shadows using half-angle slicing technique. Uses CUDA for procedural simulation, Thrust Library for sorting algorithms, and OpenGL for graphics rendering.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cudaGLSetGLDevice, cudaGraphicsMapResources, cudaGraphicsUnmapResources, cudaGraphicsResourceGetMappedPointer, cudaGraphicsRegisterResource, cudaGraphicsGLRegisterBuffer, cudaGraphicsUnregisterResource |
| Key Concepts | Graphics Interop, Data Parallel Algorithms, Physically-Based Simulation |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | smokeParticles.pdf |
3.7. Advanced Reference
Quad Tree (CUDA Dynamic Parallelism)
This sample demonstrates Quad Trees implemented using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
| Minimum Required GPU | KEPLER SM 3.5 |
|---|---|
| Key Concepts | CUDA Dynamic Parallelism |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
LU Decomposition (CUDA Dynamic Parallelism)
This sample demonstrates LU Decomposition implemented using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
| Minimum Required GPU | KEPLER SM 3.5 |
|---|---|
| Key Concepts | CUDA Dynamic Parallelism |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Bezier Line Tesselation (CUDA Dynamic Parallelism)
This sample demonstrates bezier tesselation of lines implemented using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
| Minimum Required GPU | KEPLER SM 3.5 |
|---|---|
| Key Concepts | CUDA Dynamic Parallelism |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Advanced Quicksort (CUDA Dynamic Parallelism)
This sample demonstrates an advanced quicksort implemented using CUDA Dynamic Parallelism. This sample requires devices with compute capability 3.5 or higher.
| Minimum Required GPU | KEPLER SM 3.5 |
|---|---|
| Key Concepts | CUDA Dynamic Parallelism |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
simpleHyperQ
This sample demonstrates the use of CUDA streams for concurrent execution of several kernels on devices which provide HyperQ (SM 3.5). Devices without HyperQ (SM 2.0 and SM 3.0) will run a maximum of two kernels concurrently.
| Minimum Required GPU | SM 1.3 |
|---|---|
| Key Concepts | CUDA Systems Integration, Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | HyperQ.pdf |
CUDA Parallel Prefix Sum with Shuffle Intrinsics (SHFL_Scan)
This example demonstrates how to use the shuffle intrinsic __shfl_up to perform a scan operation across a thread block. A GPU with Compute Capability SM 3.0. is required to run the sample
| Minimum Required GPU | KEPLER SM 3.0 |
|---|---|
| Key Concepts | Data-Parallel Algorithms, Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
CUDA Segmentation Tree Thrust Library
This sample demonstrates an approach to the image segmentation trees construction. This method is based on Boruvka's MST algorithm.
| Minimum Required GPU | SM 1.3 |
|---|---|
| Key Concepts | Data-Parallel Algorithms, Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Function Pointers
This sample illustrates how to use function pointers and implements the Sobel Edge Detection filter for 8-bit monochrome images.
| Minimum Required GPU | SM 2.0 |
|---|---|
| Key Concepts | Graphics Interop, Image Processing |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
CUDA C 3D FDTD
This sample applies a finite differences time domain progression stencil on a 3D surface.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
CUDA Context Thread Management
Simple program illustrating how to the CUDA Context Management API and uses the new CUDA 4.0parameter passing and CUDA launch API. CUDA contexts can be created separately and attached independently to different threads.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cuCtxCreate, cuCtxDestroy, cuModuleLoad, cuModuleLoadDataEx, cuModuleGetFunction, cuLaunchKernel, cuMemcpyDtoH, cuCtxPushCurrent, cuCtxPopCurrent |
| Key Concepts | CUDA Driver API |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version)
This sample revisits matrix multiplication using the CUDA driver API. It demonstrates how to link to CUDA driver at runtime and how to use JIT (just-in-time) compilation from PTX code. It has been written for clarity of exposition to illustrate various CUDA programming principles, not with the goal of providing the most performant generic kernel for matrix multiplication. CUBLAS provides high-performance matrix multiplication.
| Minimum Required GPU | SM 1.0 |
|---|---|
| CUDA API | cuModuleLoad, cuModuleLoadDataEx, cuModuleGetFunction, cuMemAlloc, cuMemFree, cuMemcpyHtoD, cuMemcpyDtoH, cuLaunchKernel |
| Key Concepts | CUDA Driver API, CUDA Dynamically Linked Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Scalar Product
This sample calculates scalar products of a given set of input vector pairs.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Linear Algebra |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Concurrent Kernels
This sample demonstrates the use of CUDA streams for concurrent execution of several kernels on devices of compute capability 2.0 or higher. Devices of compute capability 1.x will run the kernels sequentially. It also illustrates how to introduce dependencies between CUDA streams with the new cudaStreamWaitEvent function introduced in CUDA 3.2
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Aligned Types
A simple test, showing huge access speed gap between aligned and misaligned structures.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
PTX Just-in-Time compilation
This sample uses the Driver API to just-in-time compile (JIT) a Kernel from PTX code. Additionally, this sample demonstrates the seamless interoperability capability of the CUDA Runtime and CUDA Driver API calls. For CUDA 5.5, this sample shows how to use cuLink* functions to link PTX assembly using the CUDA driver at runtime.
| Minimum Required GPU | SM 2.0 |
|---|---|
| Key Concepts | CUDA Driver API |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Eigenvalues
The computation of all or a subset of all eigenvalues is an important problem in Linear Algebra, statistics, physics, and many other fields. This sample demonstrates a parallel implementation of a bisection algorithm for the computation of all eigenvalues of a tridiagonal symmetric matrix of arbitrary size with CUDA.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Linear Algebra |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | eigenvalues.pdf |
Fast Walsh Transform
Naturally(Hadamard)-ordered Fast Walsh Transform for batching vectors of arbitrary eligible lengths that are power of two in size.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Linear Algebra, Data-Parallel Algorithms, Video Compression |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Line of Sight
This sample is an implementation of a simple line-of-sight algorithm: Given a height map and a ray originating at some observation point, it computes all the points along the ray that are visible from the observation point. The implementation is based on the Thrust library (http://code.google.com/p/thrust/).
Matrix Transpose
This sample demonstrates Matrix Transpose. Different performance are shown to achieve high performance.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Performance Strategies, Linear Algebra |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | MatrixTranspose.pdf |
CUDA Parallel Reduction
A parallel sum reduction that computes the sum of a large arrays of values. This sample demonstrates several important optimization strategies for 1:Data-Parallel Algorithms like reduction.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Data-Parallel Algorithms, Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | reduction.pdf |
CUDA Parallel Prefix Sum (Scan)
This example demonstrates an efficient CUDA implementation of parallel prefix sum, also known as "scan". Given an array of numbers, scan computes a new array in which each element is the sum of all the elements before it in the input array.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Data-Parallel Algorithms, Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
threadFenceReduction
This sample shows how to perform a reduction operation on an array of values using the thread Fence intrinsic. to produce a single value in a single kernel (as opposed to two or more kernel calls as shown in the "reduction" CUDA Sample). Single-pass reduction requires global atomic instructions (Compute Capability 1.1 or later) and the _threadfence() intrinsic (CUDA 2.2 or later).
| Minimum Required GPU | SM 1.1 |
|---|---|
| Key Concepts | Data-Parallel Algorithms, Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
CUDA Radix Sort (Thrust Library)
This sample demonstrates a very fast and efficient parallel radix sort uses Thrust library (http://code.google.com/p/thrust/). The included RadixSort class can sort either key-value pairs (with float or unsigned integer keys) or keys only. The optimized code in this sample (and also in reduction and scan) uses a technique known as warp-synchronous programming, which relies on the fact that within a warp of threads running on a CUDA GPU, all threads execute instructions synchronously. The code uses this to avoid __syncthreads() when threads within a warp are sharing data via __shared__ memory. It is important to note that for this to work correctly without race conditions on all GPUs, the shared memory used in these warp-synchronous expressions must be declared volatile. If it is not declared volatile, then in the absence of __syncthreads(), the compiler is free to delay stores to __shared__ memory and keep the data in registers (an optimization technique), which will result in incorrect execution. So please heed the use of volatile in these samples and use it in the same way in any code you derive from them.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Data-Parallel Algorithms, Performance Strategies |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
| Whitepaper | readme.txt |
CUDA Sorting Networks
This sample implements bitonic sort and odd-even merge sort (also known as Batcher's sort), algorithms belonging to the class of sorting networks. While generally subefficient, for large sequences compared to algorithms with better asymptotic algorithmic complexity (i.e. merge sort or radix sort), this may be the preferred algorithms of choice for sorting batches of short-sized to mid-sized (key, value) array pairs. Refer to an excellent tutorial by H. W. Lang http://www.iti.fh-flensburg.de/lang/algorithmen/sortieren/networks/indexen.htm
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Data-Parallel Algorithms |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Stream Priorities
This sample demonstrates basic use of stream priorities.
| Minimum Required GPU | SM 3.5 |
|---|---|
| Key Concepts | CUDA Streams and Events |
| Supported OSes | Linux (tar.gz) |
Merge Sort
This sample implements a merge sort (also known as Batcher's sort), algorithms belonging to the class of sorting networks. While generally subefficient on large sequences compared to algorithms with better asymptotic algorithmic complexity (i.e. merge sort or radix sort), may be the algorithms of choice for sorting batches of short- to mid-sized (key, value) array pairs. Refer to the excellent tutorial by H. W. Lang http://www.iti.fh-flensburg.de/lang/algorithmen/sortieren/networks/indexen.htm
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Data-Parallel Algorithms |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
3.8. Cudalibraries Reference
JPEG encode/decode and resize with NPP
This sample demonstrates a simple image processing pipline. First, a JPEG file is huffman decoded and inverse DCT transformed and dequantized. Then the different plances are resized. Finally, the resized image is quantized, forward DCT transformed and huffman encoded.
| Minimum Required GPU | SM 2.0 |
|---|---|
| CUDA API | nppGetGpuComputeCapability, nppiDCTInitAlloc, nppiDecodeHuffmanScanHost_JPEG_8u16s_P3R, nppiDCTQuantInv8x8LS_JPEG_16s8u_C1R_NEW, nppiResizeSqrPixel_8u_C1R, nppiEncodeHuffmanGetSize, nppiDCTFree |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
simpleDevLibCUBLAS GPU Device API Library Functions (CUDA Dynamic Parallelism)
This sample implements a simple CUBLAS function calls that call GPU device API library running CUBLAS functions. This sample requires a SM 3.5 capable device.
| Minimum Required GPU | KEPLER SM 3.5 |
|---|---|
| CUDA API | cublasCreate, cublasSetVector, cublasSgemm, cudaMalloc, cudaFree, cudaMemcpy |
| Key Concepts | CUDA Dynamic Parallelism, Linear Algebra |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
MersenneTwisterGP11213
This sample demonstrates the Mersenne Twister random number generator GP11213 in cuRAND.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Computational Finance, CURAND Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
GrabCut with NPP
CUDA Implementation of Rother et al. GrabCut approach using the 8 neighborhood NPP Graphcut primitive introduced in CUDA 4.1. (C. Rother, V. Kolmogorov, A. Blake. GrabCut: Interactive Foreground Extraction using Iterated Graph Cuts. ACM Transactions on Graphics (SIGGRAPH'04), 2004)
| Minimum Required GPU | SM 1.1 |
|---|---|
| Key Concepts | Performance Strategies, Image Processing, NPP Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Image Segmentation using Graphcuts with NPP
This sample that demonstrates how to perform image segmentation using the NPP GraphCut function.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Image Processing, Performance Strategies, NPP Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Histogram Equalization with NPP
This CUDA Sample demonstrates how to use NPP for histogram equalization for image data.
| Minimum Required GPU | SM 1.1 |
|---|---|
| Key Concepts | Image Processing, Performance Strategies, NPP Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
FreeImage and NPP Interopability
A simple CUDA Sample demonstrate how to use FreeImage library with NPP.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Performance Strategies, Image Processing, NPP Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Box Filter with NPP
A NPP CUDA Sample that demonstrates how to use NPP FilterBox function to perform a Box Filter.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Performance Strategies, Image Processing, NPP Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Preconditioned Conjugate Gradient
This sample implements a preconditioned conjugate gradient solver on GPU using CUBLAS and CUSPARSE library.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Linear Algebra, CUBLAS Library, CUSPARSE Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Random Fog
This sample illustrates pseudo- and quasi- random numbers produced by CURAND.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | 3D Graphics, CURAND Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Monte Carlo Single Asian Option
This sample uses Monte Carlo to simulate Single Asian Options using the NVIDIA CURAND library.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Random Number Generator, Computational Finance, CURAND Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Monte Carlo Estimation of Pi (batch QRNG)
This sample uses Monte Carlo simulation for Estimation of Pi (using batch QRNG). This sample also uses the NVIDIA CURAND library.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Random Number Generator, Computational Finance, CURAND Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Monte Carlo Estimation of Pi (batch PRNG)
This sample uses Monte Carlo simulation for Estimation of Pi (using batch PRNG). This sample also uses the NVIDIA CURAND library.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Random Number Generator, Computational Finance, CURAND Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Monte Carlo Estimation of Pi (batch inline QRNG)
This sample uses Monte Carlo simulation for Estimation of Pi (using batch inline QRNG). This sample also uses the NVIDIA CURAND library.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Random Number Generator, Computational Finance, CURAND Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Monte Carlo Estimation of Pi (inline PRNG)
This sample uses Monte Carlo simulation for Estimation of Pi (using inline PRNG). This sample also uses the NVIDIA CURAND library.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Random Number Generator, Computational Finance, CURAND Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
ConjugateGradient
This sample implements a conjugate gradient solver on GPU using CUBLAS and CUSPARSE library.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Linear Algebra, CUBLAS Library, CUSPARSE Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
batchCUBLAS
A CUDA Sample that demonstrates how using batched CUBLAS API calls to improve overall performance.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Linear Algebra, CUBLAS Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple CUBLAS
Example of using CUBLAS using the new CUBLAS API interface available in CUDA 4.0.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Image Processing, CUBLAS Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
Simple CUFFT
Example of using CUFFT. In this example, CUFFT is used to compute the 1D-convolution of some signal with some filter by transforming both into frequency domain, multiplying them together, and transforming the signal back to time domain.
| Minimum Required GPU | SM 1.0 |
|---|---|
| Key Concepts | Image Processing, CUFFT Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
ConjugateGradientUM
This sample implements a conjugate gradient solver on GPU using CUBLAS and CUSPARSE library, using Unified Memory
| Minimum Required GPU | SM 3.0 |
|---|---|
| Key Concepts | Unified Memory, Linear Algebra, CUBLAS Library, CUSPARSE Library |
| Supported OSes | Linux (tar.gz), Windows (zip), OS X (tar.gz) |
4. Known Issues
4.1. Known Issues in CUDA Samples for Windows
-
In code sample alignedTypes, the following aligned type does not provide maximum throughput because of a compiler bug:
typedef struct __align__(16) { unsigned int r, g, b; } RGB32;
The workaround is to use the following type instead:
typedef struct __align__(16) { unsigned int r, g, b, a; } RGBA32;
as illustrated in the sample.
-
By default the CUDA Samples 6.0 will be installed to:
ProgramData\NVIDIA Corporation\CUDA Samples\v6.0
so it will not have conflicts with Vista with UAC.
By default, UAC is enabled for Vista. If UAC is disabled, the user is free to install the samples in other folders.
Before CUDA 2.1, the samples installation path would be under:
Program Files\NVIDIA Corporation\NVIDIA CUDA SDK
Starting with CUDA 2.1, the new default installation folder was:
Application Data\NVIDIA Corporation\NVIDIA CUDA SDK
residing under All Users or Current.
For NVIDIA GPU Computing 4.2 Release, the installation path was under:
ProgramData\NVIDIA Corporation\NVIDIA GPU Computing SDK 4.2
For NVIDIA GPU Computing 5.0 Release, the installation path was under:
ProgramData\NVIDIA Corporation\CUDA Samples\v5.0
For NVIDIA CUDA Samples 5.5 Release, the installation path was under:
ProgramData\NVIDIA Corporation\CUDA Samples\v5.5
residing under All Users or Current.
With NVIDIA CUDA Samples 6.0 Release, the new default installation folder is:
ProgramData\NVIDIA Corporation\CUDA Samples\v6.0
residing under All Users or Current.
-
There are number of samples that are not pre-built with the CUDA Samples. Why are these samples not pre-built?
TODO sample name
TODO description
-
TODO: More info
TODO other sample name
TODO another description
4.2. Known Issues in CUDA Samples for Linux
- The samples that make use of OpenGL fail to build or link. This is because many of the default installations for many Linux
distributions do not include the necessary OpenGL, GLUT, GLU, GLEW, X11, Xi, Xlib, or Xmi headers or libraries. Here are some
general and specific solutions:
-
Redhat 4 Linux Distributions
ld: cannot find -lglut
On some Linux installations, building the simpleGL example shows the following linking error:
/usr/bin/ld: cannot find -lglut
Typically this is because the makefiles look for libglut.so and not for variants of it (like libglut.so.3). To confirm this is the problem, simply run the following command:
ls /usr/lib | grep glut ls /usr/lib64 | grep glut
You should see the following (or similar) output:
lrwxrwxrwx 1 root root 16 Jan 9 14:06 libglut.so.3 -> libglut.so.3.8.0 -rwxr-xr-x 1 root root 164584 Aug 14 2004 libglut.so.3.8.0
If you have libglut.so.3 in /usr/lib and/or /usr/lib64, simply run the following command as root:
ln -s /usr/lib/libglut.so.3 /usr/lib/libglut.so ln -s /usr/lib64/libglut.so.3 /usr/lib64/libglut.so
If you do NOT have libglut.so.3 then you can check whether the glut package is installed on your RHEL system with the following command:
rpm -qa | grep glut
You should see freeglut-2.2.2-14 or similar in the output. If not, you or your system administrator should install the package freeglut-2.2.2-14. Refer to the Red Hat and/or rpm documentation for instructions.
If you have libglut.so.3 but you do not have write access to /usr/lib, you can also fix the problem by creating the soft link in a directory to which you have write permissions and then add that directory to the library search path (-L) in the Makefile.
-
Some Linux distributions (i.e., Redhat or Fedora) do not include the GLU library. For the latest packages download this file from this website. Please make sure you match the correct Linux distribution.
http://fr.rpmfind.net/linux/rpm2html/search.php?query=libGLU.so.1&submit=Search+... -
(SLED11) SUSE Linux 11 is missing:
libGLU, libX11, libXi, libXm, libXmu
This particular version of SUSE Linux Enterprise Edition 11 (SLED11) does not have the proper symbolic links for the following libraries:
-
libGLU
ls /usr/lib | grep GLU ls /usr/lib64 | grep GLU
libGLU.so.1 libGLU.so.1.3.0370300
To create the proper symbolic links (32-bit and 64-bit OS):
ln -s /usr/lib/libGLU.so.1 /usr/lib/libGLU.so ln -s /usr/lib64/libGLU.so.1 /usr/lib64/libGLU.so
-
libX11
ls /usr/lib | grep X11 ls /usr/lib64 | grep X11
libX11.so.6 libX11.so.6.2.0
To create the proper symbolic links (32-bit and 64-bit OS):
ln -s /usr/lib/libX11.so.6 /usr/lib/libX11.so ln -s /usr/lib64/libX11.so.6 /usr/lib64/libX11.so
-
libXi
ls /usr/lib | grep Xi ls /usr/lib64 | grep Xi
libXi.so.6 libXi.so.6.0.0
To create the proper symbolic links (32-bit and 64-bit OS):
ln -s /usr/lib/libXi.so.6 /usr/lib/libXi.so ln -s /usr/lib64/libXi.so.6 /usr/lib64/libXi.so
-
libXm
ls /usr/lib | grep Xm ls /usr/lib64 | grep Xm
libXm.so.6 libXm.so.6.0.0
To create the proper symbolic links (32-bit and 64-bit OS):
ln -s /usr/lib/libXm.so.6 /usr/lib/libXm.so ln -s /usr/lib64/libXm.so.6 /usr/lib64/libXm.so
-
libXmu
ls /usr/lib | grep Xmu ls /usr/lib64 | grep Xmu
libXmu.so.6 libXmu.so.6.0.0
To create the proper symbolic links (32-bit and 64-bit OS):
ln -s /usr/lib/libXmu.so.6 /usr/lib/libXmu.so ln -s /usr/lib64/libXmu.so.6 /usr/lib64/libXmu.so
-
-
Ubuntu Linux unable to build these samples that use OpenGL
The default Ubuntu distribution is missing many libraries.
- What is missing are the GLUT, Xi, Xmu, GL, and X11 headers. To add these headers and libraries to your distribution, type
the following in at the command line:
sudo apt-get install freeglut3-dev build-essential libx11-dev libxmu-dev libxi-dev libgl1-mesa-glx libglu1-mesa libglu1-mesa-dev
- Note, by installing Mesa, you may see linking errors against libGL. This can be solved below:
cd /usr/lib/ sudo rm libGL.so sudo ln -s libGL.so.1 libGL.so
- What is missing are the GLUT, Xi, Xmu, GL, and X11 headers. To add these headers and libraries to your distribution, type
the following in at the command line:
- In code sample alignedTypes, the following aligned type does not provide maximum throughput because of a compiler bug:
typedef struct __align__(16) { unsigned int r, g, b; } RGB32;
The workaround is to use the following type instead:typedef struct __align__(16) { unsigned int r, g, b, a; } RGBA32;
as illustrated in the sample. -
Unable to build simpleMPI sample on Linux Distros
simpleMPI.cpp:35:17: error: mpi.h: No such file or directory
The Linux system is missing the libraries and headers for MPI.
-
For OpenSuSE or RedHat distributions: Search http://www.rpmfind.net for openmpi-devel for your specific distribution
For Ubuntu or Debian distributions, using apt-get:
sudo apt-get install build-essential openmpi-bin openmpi-dev
- For 32-bit Linux distributions:
ln -s /usr/lib/mpi/gcc/openmpi/lib/libmpi_cxx.so.0 /usr/lib/libmpi_cxx.so ln -s /usr/lib/mpi/gcc/openmpi/lib/libmpi.so.0 /usr/lib/libmpi.so ln -s /usr/lib/mpi/gcc/openmpi/lib/libopen-rte.so.0 /usr/lib/libopen-rte.so ln -s /usr/lib/mpi/gcc/openmpi/lib/libopen-pal.so.0 /usr/lib/libopen-pal.so
- For 64-bit Linux distributions:
ln -s /usr/lib64/mpi/gcc/openmpi/lib64/libmpi_cxx.so.0 /usr/lib64/libmpi_cxx.so ln -s /usr/lib64/mpi/gcc/openmpi/lib64/libmpi.so.0 /usr/lib64/libmpi.so ln -s /usr/lib64/mpi/gcc/openmpi/lib64/libopen-rte.so.0 /usr/lib64/libopen-rte.so ln -s /usr/lib64/mpi/gcc/openmpi/lib64/libopen-pal.so.0 /usr/lib64/libopen-pal.so
-
-
Fedora 13 or 14 has linking error when building the following samples:
MonteCarloMultiGPU, simpleMultiGPU, threadMigration
The following error is seen:
make -C 6_Advanced/threadMigration/ make[1]: Entering directory `/root/{cuda-samples-path}/6_Advanced/threadMigration' /usr/bin/ld: obj/i386/release/threadMigration.cpp.o: undefined reference to symbol 'pthread_create@@GLIBC_2.1' /usr/bin/ld: note: 'pthread_create@@GLIBC_2.1' is defined in DSO /lib/libpthread.so.0 so try adding it to the linker command line /lib/libpthread.so.0: could not read symbols: Invalid operation collect2: ld returned 1 exit status make[1]: *** [../../bin/x86_64/linux/release/threadMigration] Error 1 make[1]: Leaving directory `/root/{cuda-samples-path}/6_Advanced/threadMigration' make: *** [6_Advanced/threadMigration/Makefile.ph_build] Error 2For these Linux distributions: Fedora 13 or 14, symbolic links are missing from the following libraries:
libpthread
To create the proper symbolic links (32-bit OS and 64-bit OS) type this:
ln -s /usr/lib/libpthread.so.0 /usr/lib/libpthread.so ln -s /usr/lib64/libpthread.so.0 /usr/lib64/libpthread.so
-
4.3. Known Issues in CUDA Samples for Mac OS X
- With release CUDA 5.0, support for Mac OS X 10.8.x (Mountain Lion) is added
- With release CUDA 4.0, support for Mac OS X 10.7.x (Lion) is added
- With release CUDA 3.1, Mac OS X now supports CUDA Runtime API (with 64-bit applications)
- CUDA 3.1 Beta and newer now supports 10.6.3 (Snow Leopard) 64-bit Runtime API.
- For CUDA 3.0, Note on CUDA Mac 10.5.x (Leopard) or 10.6.x (Snow Leopard). CUDA applications built with the CUDA driver API can run as either 32-bit or 64-bit applications. CUDA applications using CUDA Runtime APIs can only be built on 32-bit applications.
5. Key Concepts and Associated Samples
The tables below describe the key concepts of the CUDA Toolkit and lists the samples that illustrate how that concept is used.
Basic Key Concepts
Basic Concepts demonstrates how to make use of CUDA features.
| Basic Key Concept | Description | Samples |
|---|---|---|
|
3D Rendering |
Random Fog, Simple Direct3D10 (Vertex Array), Simple OpenGL | |
|
Volume Textures |
Simple Texture 3D | |
|
GPU Assert |
simpleAssert | |
|
Overlapping I/O and Compute |
Peer-to-Peer Bandwidth Latency Test with Multi-GPUs, Simple Multi Copy and Compute, Simple Multi-GPU, Simple Peer-to-Peer Transfers with Multi-GPU, asyncAPI, simpleStreams | |
|
Using atomics with GPU kernels |
Simple Atomic Intrinsics | |
|
Use C++ overloading with GPU kernels |
cppOverload | |
|
Using Templates with GPU kernels |
Simple Templates | |
|
CUDA BLAS samples |
Matrix Multiplication (CUBLAS), Unified Memory Streams | |
|
CUDA BLAS samples |
Simple CUBLAS, batchCUBLAS | |
|
CUDA Data I/O |
Template using CUDA Runtime | |
|
Samples that show the CUDA Driver API |
Device Query Driver API, Matrix Multiplication (CUDA Driver API Version), Simple Texture (Driver Version), Using Inline PTX, Vector Addition Driver API | |
|
Dynamic Parallelism with GPU Kernels (SM 3.5) |
Simple Print (CUDA Dynamic Parallelism), simpleDevLibCUBLAS GPU Device API Library Functions (CUDA Dynamic Parallelism) | |
|
Samples that use the Runtime API |
Device Query, Matrix Multiplication (CUBLAS), Matrix Multiplication (CUDA Runtime API Version), Simple Texture, Vector Addition | |
|
Stream API definies a sequence of operations that can be overlapped with I/O |
Simple CUDA Callbacks | |
|
Synchronizing Kernels with Event Timers and Streams |
Bandwidth Test, Simple Multi Copy and Compute, Simple Multi-GPU, Unified Memory Streams, asyncAPI, cppOverload, simpleStreams | |
|
Samples that integrate with Multi Process (OpenMP, IPC, and MPI) |
Unified Memory Streams, cudaOpenMP, simpleMPI | |
|
Samples that use the CUDA FFT accelerated library |
Simple CUFFT | |
|
Samples that use the CUDA random number generator |
MersenneTwisterGP11213, Random Fog | |
|
Creating Callback functions with GPU kernels |
Simple CUDA Callbacks | |
|
Finance Algorithms |
Black-Scholes Option Pricing, MersenneTwisterGP11213 | |
|
Samples that show good usage of Data Parallel Algorithms |
CUDA Separable Convolution, Texture-based Separable Convolution | |
|
Samples useful for debugging |
simplePrintf | |
|
Samples that show GPU Device side memory allocation |
Template, Template using CUDA Runtime | |
|
Sample showing simple device query of information |
Device Query, Device Query Driver API | |
|
Samples demonstrating high performance and data I/O |
Simple Multi Copy and Compute | |
|
Samples that demonstrate interop between graphics APIs and CUDA |
Bicubic B-spline Interoplation, Bilateral Filter, Box Filter, CUDA and OpenGL Interop of Images, Simple D3D10 Texture, Simple D3D11 Texture, Simple D3D9 Texture, Simple Direct3D10 (Vertex Array), Simple Direct3D10 Render Target, Simple Direct3D9 (Vertex Arrays), Simple OpenGL, Simple Texture 3D | |
|
Samples that demonstrate image processing algorithms in CUDA |
Bicubic B-spline Interoplation, Bilateral Filter, Box Filter, Box Filter with NPP, CUDA Separable Convolution, CUDA and OpenGL Interop of Images, FreeImage and NPP Interopability, GrabCut with NPP, Histogram Equalization with NPP, Image Segmentation using Graphcuts with NPP, Pitch Linear Texture, Simple CUBLAS, Simple CUFFT, Simple D3D11 Texture, Simple Surface Write, Simple Texture, Simple Texture (Driver Version), Simple Texture 3D, Texture-based Separable Convolution | |
|
Samples demonstrating linear algebra with CUDA |
Matrix Multiplication (CUBLAS), Matrix Multiplication (CUDA Runtime API Version), batchCUBLAS, simpleDevLibCUBLAS GPU Device API Library Functions (CUDA Dynamic Parallelism) | |
|
Samples demonstrating how to use CUDA with MPI programs |
simpleMPI | |
|
Samples demonstrating matrix multiply CUDA |
Matrix Multiplication (CUDA Driver API Version) | |
|
Samples demonstrating how to take advantage of multiple GPUs and CUDA |
Peer-to-Peer Bandwidth Latency Test with Multi-GPUs, Simple Multi-GPU, Simple Peer-to-Peer Transfers with Multi-GPU | |
|
Samples demonstrating how to use multithreading with CUDA |
Simple CUDA Callbacks, Simple Multi-GPU, Unified Memory Streams, cudaOpenMP, simpleMPI | |
|
Samples demonstrating how to use NPP (NVIDIA Performance Primitives) for image processing |
Box Filter with NPP, FreeImage and NPP Interopability, GrabCut with NPP, Histogram Equalization with NPP, Image Segmentation using Graphcuts with NPP | |
|
Samples demonstrating how to use OpenMP |
Unified Memory Streams, cudaOpenMP | |
|
Samples demonstrating how to overlap Compute and Data I/O |
Simple Multi Copy and Compute | |
|
Samples demonstrating how to use PTX code with CUDA |
Using Inline PTX | |
|
Samples demonstrating how to handle P2P data transfers between multiple GPUs |
Peer-to-Peer Bandwidth Latency Test with Multi-GPUs, Simple Peer-to-Peer Transfers with Multi-GPU | |
|
Samples demonstrating high performance with CUDA |
Bandwidth Test, Box Filter with NPP, CUDA and OpenGL Interop of Images, Clock, FreeImage and NPP Interopability, GrabCut with NPP, Histogram Equalization with NPP, Image Segmentation using Graphcuts with NPP, Matrix Multiplication (CUBLAS), Peer-to-Peer Bandwidth Latency Test with Multi-GPUs, Simple Peer-to-Peer Transfers with Multi-GPU, Using Inline PTX, simpleZeroCopy | |
|
Samples demonstrating how to properly handle data I/O efficiently between the CPU host and GPU video memory |
simpleZeroCopy | |
|
Samples demonstrating how to use CUDA library linking |
Simple Static GPU Device Library | |
|
Samples demonstrating how to use Surface Writes with GPU kernels |
Simple Surface Write, Simple Texture 3D | |
|
Samples demonstrating how to use textures GPU kernels |
Pitch Linear Texture, Simple Cubemap Texture, Simple D3D10 Texture, Simple D3D9 Texture, Simple Direct3D10 Render Target, Simple Layered Texture, Simple Surface Write, Simple Texture, Simple Texture (Driver Version), Texture-based Separable Convolution | |
|
Samples demonstrating how to use Unified Memory |
ConjugateGradientUM, Unified Memory Streams | |
|
Samples demonstrating how to use UVA with CUDA programs |
Peer-to-Peer Bandwidth Latency Test with Multi-GPUs, Simple Peer-to-Peer Transfers with Multi-GPU | |
|
Samples demonstrating how to use Vector Addition with CUDA programs |
Vector Addition, Vector Addition Driver API, simpleZeroCopy | |
|
Samples demonstrating how to use Vertex Buffers with CUDA kernels |
Simple OpenGL | |
|
Samples demonstrating how to use 3D Textures for volume rendering |
Simple Cubemap Texture, Simple Layered Texture | |
|
Samples demonstrating how to use vote intrinsics with CUDA |
Simple Vote Intrinsics |
Advanced Key Concepts
Advanced Concepts demonstrate advanced techniques and algorithms implemented with CUDA.
| Advanced Key Concept | Description | Samples |
|---|---|---|
|
Texture Mapping |
SLI D3D10 Texture | |
|
3D Rendering |
Marching Cubes Isosurfaces | |
|
Volume Textures |
Volume Rendering with 3D Textures, Volumetric Filtering with 3D Textures and Surface Writes | |
|
CUDA BLAS samples |
ConjugateGradient, ConjugateGradientUM, Preconditioned Conjugate Gradient | |
|
Samples that show the CUDA Driver API |
CUDA Context Thread Management, Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), PTX Just-in-Time compilation | |
|
Dynamic Parallelism with GPU Kernels (SM 3.5) |
Advanced Quicksort (CUDA Dynamic Parallelism), Bezier Line Tesselation (CUDA Dynamic Parallelism), LU Decomposition (CUDA Dynamic Parallelism), Quad Tree (CUDA Dynamic Parallelism), Simple Quicksort (CUDA Dynamic Parallelism) | |
|
Dynamic loading of the CUDA DLL using CUDA Driver API |
Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version) | |
|
Synchronizing Kernels with Event Timers and Streams |
Stream Priorities | |
|
Samples that integrate with Multi Process (OpenMP, IPC, and MPI) |
simpleHyperQ | |
|
Samples that use the CUDA FFT accelerated library |
CUDA FFT Ocean Simulation, FFT-Based 2D Convolution, Fluids (Direct3D Version), Fluids (OpenGL Version) | |
|
Samples that use the CUDA random number generator |
Monte Carlo Estimation of Pi (batch PRNG), Monte Carlo Estimation of Pi (batch QRNG), Monte Carlo Estimation of Pi (batch inline QRNG) , Monte Carlo Estimation of Pi (inline PRNG), Monte Carlo Single Asian Option | |
|
Samples that use the cuSPARSE (Sparse Vector Matrix Multiply) functions |
ConjugateGradient, ConjugateGradientUM, Preconditioned Conjugate Gradient | |
|
Finance Algorithms |
Binomial Option Pricing, Monte Carlo Estimation of Pi (batch PRNG), Monte Carlo Estimation of Pi (batch QRNG), Monte Carlo Estimation of Pi (batch inline QRNG) , Monte Carlo Estimation of Pi (inline PRNG), Monte Carlo Single Asian Option, Niederreiter Quasirandom Sequence Generator, Sobol Quasirandom Number Generator | |
|
Samples that show good usage of Data Parallel Algorithms |
CUDA Histogram, CUDA N-Body Simulation, Mandelbrot, Optical Flow, Particles, Smoke Particles, VFlockingD3D10 | |
|
Samples that show good usage of Data Parallel Algorithms |
CUDA Parallel Prefix Sum (Scan), CUDA Parallel Prefix Sum with Shuffle Intrinsics (SHFL_Scan), CUDA Parallel Reduction, CUDA Radix Sort (Thrust Library), CUDA Segmentation Tree Thrust Library, CUDA Sorting Networks, Fast Walsh Transform, Merge Sort, threadFenceReduction | |
|
Samples that demonstrate interop between graphics APIs and CUDA |
Bindless Texture, CUDA FFT Ocean Simulation, CUDA N-Body Simulation, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, CUDA Video Encode (C Library) API, Fluids (Direct3D Version), Fluids (OpenGL Version), Function Pointers, Mandelbrot, Particles, Post-Process in OpenGL, Recursive Gaussian Filter, SLI D3D10 Texture, Smoke Particles, Sobel Filter, VFlockingD3D10, Volume Rendering with 3D Textures, Volumetric Filtering with 3D Textures and Surface Writes | |
|
Samples that demonstrate image and video compression |
DirectX Texture Compressor (DXTC) | |
|
Samples that demonstrate image processing algorithms in CUDA |
1D Discrete Haar Wavelet Decomposition, CUDA FFT Ocean Simulation, CUDA Histogram, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, DCT8x8, DirectX Texture Compressor (DXTC), FFT-Based 2D Convolution, Function Pointers, Image denoising, Optical Flow, Post-Process in OpenGL, Recursive Gaussian Filter, SLI D3D10 Texture, Sobel Filter, Stereo Disparity Computation (SAD SIMD Intrinsics), Volume Rendering with 3D Textures, Volumetric Filtering with 3D Textures and Surface Writes | |
|
Samples demonstrating linear algebra with CUDA |
ConjugateGradient, ConjugateGradientUM, Eigenvalues, Fast Walsh Transform, Matrix Transpose, Preconditioned Conjugate Gradient, Scalar Product | |
|
Samples demonstrating how to use interoperability CUDA with OpenGL |
Marching Cubes Isosurfaces | |
|
Samples demonstrating high performance with CUDA |
Aligned Types, CUDA C 3D FDTD, CUDA Parallel Prefix Sum (Scan), CUDA Parallel Prefix Sum with Shuffle Intrinsics (SHFL_Scan), CUDA Parallel Reduction, CUDA Radix Sort (Thrust Library), CUDA Segmentation Tree Thrust Library, Concurrent Kernels, Matrix Transpose, Particles, SLI D3D10 Texture, VFlockingD3D10, simpleHyperQ, threadFenceReduction | |
|
Samples demonstrating high performance collisions and/or physocal interactions |
Marching Cubes Isosurfaces | |
|
Samples demonstrating high performance collisions and/or physocal interactions |
CUDA N-Body Simulation, Fluids (Direct3D Version), Fluids (OpenGL Version), Particles, Smoke Particles, VFlockingD3D10 | |
|
Samples demonstrating how to use random number generation with CUDA |
Monte Carlo Estimation of Pi (batch PRNG), Monte Carlo Estimation of Pi (batch QRNG), Monte Carlo Estimation of Pi (batch inline QRNG) , Monte Carlo Estimation of Pi (inline PRNG), Monte Carlo Single Asian Option | |
|
Samples demonstrating recursion on CUDA |
Interval Computing | |
|
Samples demonstrating how to use Surface Writes with GPU kernels |
Volumetric Filtering with 3D Textures and Surface Writes | |
|
Samples demonstrating how to use templates GPU kernels |
Interval Computing | |
|
Samples demonstrating how to use textures GPU kernels |
Bindless Texture | |
|
Samples demonstrating how to use Vertex Buffers with CUDA kernels |
Marching Cubes Isosurfaces | |
|
Samples demonstrating how to use video compression with CUDA |
1D Discrete Haar Wavelet Decomposition, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, CUDA Video Encode (C Library) API, DCT8x8, Fast Walsh Transform | |
|
Samples demonstrating how to use video intrinsics with CUDA |
Stereo Disparity Computation (SAD SIMD Intrinsics) |
6. CUDA API and Associated Samples
The tables below list the samples associated with each CUDA API.
CUDA Driver API Samples
The table below lists the samples associated with each CUDA Driver API.
| CUDA Driver API | Samples |
|---|---|
| Simple Texture (Driver Version) | |
| Simple Texture (Driver Version) | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| Simple Texture (Driver Version) | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| Simple Texture (Driver Version) | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Device Query Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Device Query Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Device Query Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Device Query Driver API | |
| Device Query Driver API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| Device Query Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Context Thread Management, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| Simple Texture (Driver Version) | |
| CUDA Context Thread Management, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Simple Texture (Driver Version) | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| Simple Texture (Driver Version) | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| Simple Texture (Driver Version) | |
| Simple Texture (Driver Version) | |
| Simple Texture (Driver Version) | |
| Simple Texture (Driver Version) | |
| Simple Texture (Driver Version) | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API |
CUDA Runtime API Samples
The table below lists the samples associated with each CUDA Runtime API.
| CUDA Runtime API | Samples |
|---|---|
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Encode (C Library) API | |
| Simple Texture (Driver Version) | |
| Simple Texture (Driver Version) | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| Simple Texture (Driver Version) | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| Simple Texture (Driver Version) | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Device Query Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Device Query Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Device Query Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Device Query Driver API | |
| Device Query Driver API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| CUDA Video Decoder GL API | |
| Device Query Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Context Thread Management, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| Simple Texture (Driver Version) | |
| CUDA Context Thread Management, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Simple Texture (Driver Version) | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Context Thread Management, CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API, Matrix Multiplication (CUDA Driver API Version), Matrix Multiplication (CUDA Driver API version with Dynamic Linking Version), Simple Texture (Driver Version), Vector Addition Driver API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| Simple Texture (Driver Version) | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| Simple Texture (Driver Version) | |
| Simple Texture (Driver Version) | |
| Simple Texture (Driver Version) | |
| Simple Texture (Driver Version) | |
| Simple Texture (Driver Version) | |
| Matrix Multiplication (CUBLAS), simpleDevLibCUBLAS GPU Device API Library Functions (CUDA Dynamic Parallelism) | |
| simpleDevLibCUBLAS GPU Device API Library Functions (CUDA Dynamic Parallelism) | |
| Matrix Multiplication (CUBLAS), simpleDevLibCUBLAS GPU Device API Library Functions (CUDA Dynamic Parallelism) | |
| Simple Surface Write | |
| Pitch Linear Texture | |
| Pitch Linear Texture, Simple Cubemap Texture, Simple Layered Texture, Simple Surface Write, Simple Texture | |
| Pitch Linear Texture, Simple Cubemap Texture, Simple Layered Texture, Simple Surface Write, Simple Texture | |
| SLI D3D10 Texture, Simple D3D10 Texture, Simple Direct3D10 (Vertex Array), Simple Direct3D10 Render Target | |
| SLI D3D10 Texture, Simple D3D10 Texture, Simple Direct3D10 (Vertex Array), Simple Direct3D10 Render Target | |
| VFlockingD3D10 | |
| Simple D3D11 Texture | |
| Simple D3D11 Texture | |
| Simple D3D9 Texture, Simple Direct3D9 (Vertex Arrays) | |
| Simple D3D9 Texture, Simple Direct3D9 (Vertex Arrays) | |
| Fluids (Direct3D Version) | |
| Peer-to-Peer Bandwidth Latency Test with Multi-GPUs, Simple Peer-to-Peer Transfers with Multi-GPU | |
| Peer-to-Peer Bandwidth Latency Test with Multi-GPUs, Simple Peer-to-Peer Transfers with Multi-GPU | |
| Peer-to-Peer Bandwidth Latency Test with Multi-GPUs, Simple Peer-to-Peer Transfers with Multi-GPU | |
| Bandwidth Test, Template, Template using CUDA Runtime | |
| Device Query | |
| Bandwidth Test, Matrix Multiplication (CUBLAS), Matrix Multiplication (CUDA Runtime API Version), Simple Multi Copy and Compute, Simple Multi-GPU, Vector Addition, asyncAPI, simpleStreams, simpleZeroCopy | |
| Peer-to-Peer Bandwidth Latency Test with Multi-GPUs, Simple Peer-to-Peer Transfers with Multi-GPU | |
| Bandwidth Test, Matrix Multiplication (CUBLAS), Matrix Multiplication (CUDA Runtime API Version), Simple Multi Copy and Compute, Simple Multi-GPU, Vector Addition, asyncAPI, simpleStreams, simpleZeroCopy | |
| Bandwidth Test, Matrix Multiplication (CUBLAS), Matrix Multiplication (CUDA Runtime API Version), Peer-to-Peer Bandwidth Latency Test with Multi-GPUs, Simple Multi Copy and Compute, Simple Multi-GPU, Simple Peer-to-Peer Transfers with Multi-GPU, Vector Addition, asyncAPI, simpleStreams, simpleZeroCopy | |
| Matrix Multiplication (CUBLAS), Matrix Multiplication (CUDA Runtime API Version), Simple Multi Copy and Compute, Simple Multi-GPU, Vector Addition, asyncAPI, simpleStreams, simpleZeroCopy | |
| Bandwidth Test, Matrix Multiplication (CUBLAS), Matrix Multiplication (CUDA Runtime API Version), Simple Multi Copy and Compute, Simple Multi-GPU, Vector Addition, asyncAPI, simpleStreams, simpleZeroCopy | |
| Matrix Multiplication (CUDA Runtime API Version), Vector Addition | |
| Bandwidth Test, C++ Integration, Clock, Matrix Multiplication (CUBLAS), Matrix Multiplication (CUDA Runtime API Version), Pitch Linear Texture, Simple Atomic Intrinsics, Simple Cubemap Texture, Simple Layered Texture, Simple Surface Write, Simple Texture, Simple Vote Intrinsics, Template, Template using CUDA Runtime, Using Inline PTX, Vector Addition, cudaOpenMP, simpleAssert, simpleDevLibCUBLAS GPU Device API Library Functions (CUDA Dynamic Parallelism), simpleMPI | |
| Pitch Linear Texture, Simple Cubemap Texture, Simple Layered Texture, Simple Surface Write, Simple Texture | |
| Bandwidth Test, Simple Atomic Intrinsics, Simple Vote Intrinsics, Template using CUDA Runtime, Using Inline PTX, simpleAssert, simpleZeroCopy | |
| cppOverload | |
| cppOverload | |
| Bicubic B-spline Interoplation, Bilateral Filter, Bindless Texture, Box Filter, CUDA FFT Ocean Simulation, CUDA N-Body Simulation, CUDA and OpenGL Interop of Images, Fluids (OpenGL Version), Mandelbrot, Marching Cubes Isosurfaces, Particles, Post-Process in OpenGL, Recursive Gaussian Filter, Simple OpenGL, Simple Texture 3D, Smoke Particles, Sobel Filter, Volume Rendering with 3D Textures, Volumetric Filtering with 3D Textures and Surface Writes | |
| Device Query | |
| Device Query | |
| SLI D3D10 Texture, Simple D3D10 Texture, Simple Direct3D10 (Vertex Array), Simple Direct3D10 Render Target | |
| Simple D3D11 Texture | |
| Simple D3D9 Texture, Simple Direct3D9 (Vertex Arrays) | |
| Bicubic B-spline Interoplation, Bilateral Filter, Bindless Texture, Box Filter, CUDA FFT Ocean Simulation, CUDA N-Body Simulation, CUDA and OpenGL Interop of Images, Fluids (Direct3D Version), Fluids (OpenGL Version), Mandelbrot, Marching Cubes Isosurfaces, Particles, Post-Process in OpenGL, Recursive Gaussian Filter, Simple OpenGL, Simple Texture 3D, Smoke Particles, Sobel Filter, VFlockingD3D10, Volume Rendering with 3D Textures, Volumetric Filtering with 3D Textures and Surface Writes | |
| Bicubic B-spline Interoplation, Bilateral Filter, Bindless Texture, Box Filter, CUDA FFT Ocean Simulation, CUDA N-Body Simulation, CUDA and OpenGL Interop of Images, Fluids (Direct3D Version), Fluids (OpenGL Version), Mandelbrot, Marching Cubes Isosurfaces, Particles, Post-Process in OpenGL, Recursive Gaussian Filter, Simple OpenGL, Simple Texture 3D, Smoke Particles, Sobel Filter, VFlockingD3D10, Volume Rendering with 3D Textures, Volumetric Filtering with 3D Textures and Surface Writes | |
| Bicubic B-spline Interoplation, Bilateral Filter, Bindless Texture, Box Filter, CUDA FFT Ocean Simulation, CUDA N-Body Simulation, CUDA and OpenGL Interop of Images, Fluids (Direct3D Version), Fluids (OpenGL Version), Mandelbrot, Marching Cubes Isosurfaces, Particles, Post-Process in OpenGL, Recursive Gaussian Filter, Simple OpenGL, Simple Texture 3D, Smoke Particles, Sobel Filter, VFlockingD3D10, Volume Rendering with 3D Textures, Volumetric Filtering with 3D Textures and Surface Writes | |
| Bicubic B-spline Interoplation, Bilateral Filter, Bindless Texture, Box Filter, CUDA FFT Ocean Simulation, CUDA N-Body Simulation, CUDA and OpenGL Interop of Images, Fluids (Direct3D Version), Fluids (OpenGL Version), Mandelbrot, Marching Cubes Isosurfaces, Particles, Post-Process in OpenGL, Recursive Gaussian Filter, Simple OpenGL, Simple Texture 3D, Smoke Particles, Sobel Filter, VFlockingD3D10, Volume Rendering with 3D Textures, Volumetric Filtering with 3D Textures and Surface Writes | |
| SLI D3D10 Texture, Simple D3D10 Texture, Simple D3D11 Texture, Simple D3D9 Texture, Simple Direct3D10 (Vertex Array), Simple Direct3D10 Render Target | |
| SLI D3D10 Texture, Simple D3D10 Texture, Simple D3D11 Texture, Simple D3D9 Texture, Simple Direct3D10 (Vertex Array), Simple Direct3D10 Render Target | |
| Bicubic B-spline Interoplation, Bilateral Filter, Bindless Texture, Box Filter, CUDA FFT Ocean Simulation, CUDA N-Body Simulation, CUDA and OpenGL Interop of Images, Fluids (Direct3D Version), Fluids (OpenGL Version), Mandelbrot, Marching Cubes Isosurfaces, Particles, Post-Process in OpenGL, Recursive Gaussian Filter, Simple OpenGL, Simple Texture 3D, Smoke Particles, Sobel Filter, VFlockingD3D10, Volume Rendering with 3D Textures, Volumetric Filtering with 3D Textures and Surface Writes | |
| Bicubic B-spline Interoplation, Bilateral Filter, Bindless Texture, Box Filter, CUDA FFT Ocean Simulation, CUDA N-Body Simulation, CUDA and OpenGL Interop of Images, Fluids (Direct3D Version), Fluids (OpenGL Version), Mandelbrot, Marching Cubes Isosurfaces, Particles, Post-Process in OpenGL, Recursive Gaussian Filter, SLI D3D10 Texture, Simple D3D10 Texture, Simple D3D11 Texture, Simple D3D9 Texture, Simple Direct3D10 (Vertex Array), Simple Direct3D10 Render Target, Simple Direct3D9 (Vertex Arrays), Simple OpenGL, Simple Texture 3D, Smoke Particles, Sobel Filter, VFlockingD3D10, Volume Rendering with 3D Textures, Volumetric Filtering with 3D Textures and Surface Writes | |
| Bandwidth Test, simpleZeroCopy | |
| simpleZeroCopy | |
| simpleZeroCopy | |
| simpleZeroCopy | |
| Simple Atomic Intrinsics, Simple Vote Intrinsics, simpleMPI | |
| C++ Integration, Clock, Matrix Multiplication (CUBLAS), Matrix Multiplication (CUDA Runtime API Version), Pitch Linear Texture, Simple Cubemap Texture, Simple Layered Texture, Simple Surface Write, Simple Texture, Template, Template using CUDA Runtime, Using Inline PTX, Vector Addition, cudaOpenMP, simpleAssert, simpleDevLibCUBLAS GPU Device API Library Functions (CUDA Dynamic Parallelism) | |
| Simple Cubemap Texture, Simple Layered Texture | |
| Pitch Linear Texture, Simple Surface Write, Simple Texture | |
| Bandwidth Test, Template using CUDA Runtime, Using Inline PTX, simpleAssert | |
| Unified Memory Streams | |
| Pitch Linear Texture | |
| Bandwidth Test, C++ Integration, Clock, Matrix Multiplication (CUBLAS), Matrix Multiplication (CUDA Runtime API Version), Peer-to-Peer Bandwidth Latency Test with Multi-GPUs, Simple Atomic Intrinsics, Simple Cubemap Texture, Simple Layered Texture, Simple Peer-to-Peer Transfers with Multi-GPU, Simple Surface Write, Simple Texture, Simple Vote Intrinsics, Template, Template using CUDA Runtime, Using Inline PTX, Vector Addition, cudaOpenMP, simpleAssert, simpleDevLibCUBLAS GPU Device API Library Functions (CUDA Dynamic Parallelism), simpleMPI | |
| Pitch Linear Texture | |
| SLI D3D10 Texture, Simple D3D10 Texture, Simple D3D11 Texture, Simple D3D9 Texture, Simple Direct3D10 (Vertex Array), Simple Direct3D10 Render Target | |
| Simple Cubemap Texture, Simple D3D9 Texture, Simple Layered Texture | |
| Bandwidth Test, Simple CUDA Callbacks, Simple Multi Copy and Compute, Simple Multi-GPU, asyncAPI, simpleStreams | |
| Pitch Linear Texture, Simple Texture | |
| Pitch Linear Texture | |
| simplePrintf | |
| simplePrintf | |
| Device Query | |
| Bandwidth Test, Device Query | |
| Simple CUDA Callbacks | |
| Unified Memory Streams | |
| Simple CUDA Callbacks | |
| Simple CUDA Callbacks | |
| Pitch Linear Texture | |
| CUDA FFT Ocean Simulation, FFT-Based 2D Convolution | |
| CUDA FFT Ocean Simulation, FFT-Based 2D Convolution | |
| CUDA FFT Ocean Simulation, FFT-Based 2D Convolution | |
| CUDA FFT Ocean Simulation, FFT-Based 2D Convolution | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Encode (C Library) API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| CUDA Video Decoder D3D9 API, CUDA Video Decoder GL API | |
| JPEG encode/decode and resize with NPP | |
| JPEG encode/decode and resize with NPP | |
| JPEG encode/decode and resize with NPP | |
| JPEG encode/decode and resize with NPP | |
| JPEG encode/decode and resize with NPP | |
| JPEG encode/decode and resize with NPP | |
| JPEG encode/decode and resize with NPP |
7. Frequently Asked Questions
The Official CUDA FAQ is available online on the NVIDIA CUDA Forums:
http://forums.nvidia.com/index.php?showtopic=84440
Notices
Notice
ALL NVIDIA DESIGN SPECIFICATIONS, REFERENCE BOARDS, FILES, DRAWINGS, DIAGNOSTICS, LISTS, AND OTHER DOCUMENTS (TOGETHER AND SEPARATELY, "MATERIALS") ARE BEING PROVIDED "AS IS." NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE MATERIALS, AND EXPRESSLY DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE.
Information furnished is believed to be accurate and reliable. However, NVIDIA Corporation assumes no responsibility for the consequences of use of such information or for any infringement of patents or other rights of third parties that may result from its use. No license is granted by implication of otherwise under any patent rights of NVIDIA Corporation. Specifications mentioned in this publication are subject to change without notice. This publication supersedes and replaces all other information previously supplied. NVIDIA Corporation products are not authorized as critical components in life support devices or systems without express written approval of NVIDIA Corporation.